 マイクロマウス
マイクロマウス からくり工房A:Macマイクロマウス合宿に参加
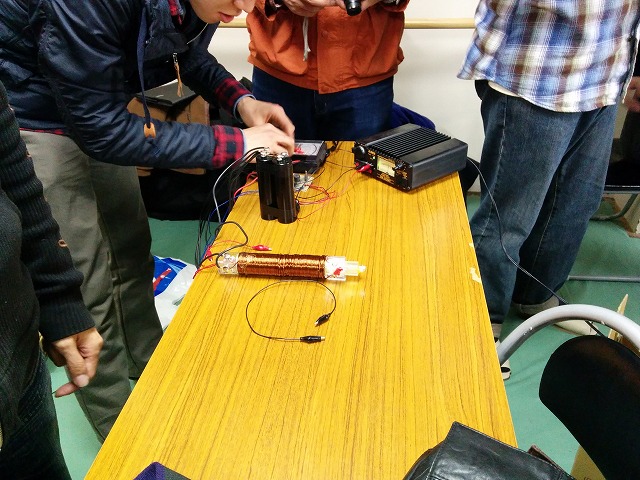
2月22、23日にからくり工房A:Macさん主催のマイクロマウス合宿に参加してきました。
からくり工房A:Macさんは中部圏マイクロマウスの社会人サークルです。
今回の合宿場所は、伊豆半島の山喜旅館で1泊2日15人+初日数人程参加です。...
マイクロマウス  2足ロボット
2足ロボット  技術ネタ
技術ネタ  2足ロボット
2足ロボット  2足ロボット
2足ロボット  2足ロボット
2足ロボット  技術ネタ
技術ネタ  2足ロボット 技術ネタ
2足ロボット 技術ネタ  2足ロボット
2足ロボット