 Raspberry Pi Mouse
Raspberry Pi Mouse Raspberry Pi Mouse V3 ホリデーセール開催中
ロングセラーRaspberry Pi Mouse V3が30%OFF
年度末に向けて、ホリデーセール開催中です
ホリデーセールでのご購入はこちらから
※フルキットは数量限定となっております。売り切れの際はご容赦ください。
<Raspbe...
Raspberry Pi Mouse  Raspberry Pi Mouse
Raspberry Pi Mouse  Raspberry Pi Mouse
Raspberry Pi Mouse 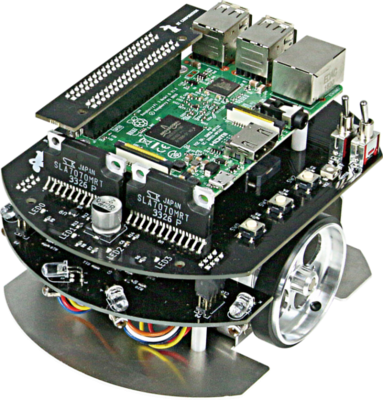 Raspberry Pi
Raspberry Pi  Raspberry Pi Mouse
Raspberry Pi Mouse  Raspberry Pi Mouse
Raspberry Pi Mouse  Raspberry Pi Mouse
Raspberry Pi Mouse  Raspberry Pi
Raspberry Pi