 Raspberry Pi
Raspberry Pi Raspberry Pi Mouse V3 と ROSサンプル集の紹介
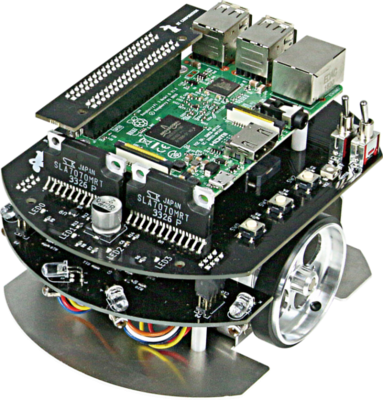
こんにちはShotaです。Raspberry Pi Mouse の新バージョン Raspberry Pi Mouse V3が販売開始されました。それと同時に、Raspberry Pi MouseのROSサンプル集も公開されました。この記事で...
Raspberry Pi  ROS
ROS  Raspberry Pi
Raspberry Pi  Raspberry Pi
Raspberry Pi