 マイクロマウス
マイクロマウス Pi:Coシリーズ最新作「Pi:Co Classic4」本日発売!
「Pi:Co Classic4」を2025年6月20日から販売開始いたします
Pi:co Classic3からの主な変更点
Webインターフェースからのパラメータ調整が可能
ジャイロセンサー搭載可能(オプション:発売予定)
...
マイクロマウス  Raspberry Pi
Raspberry Pi  Raspberry Pi Mouse
Raspberry Pi Mouse  ショップからの重要なお知らせ
ショップからの重要なお知らせ  その他のお知らせ
その他のお知らせ  イベント情報
イベント情報  ROBOTIS ROBOTIS イベント情報
ROBOTIS ROBOTIS イベント情報 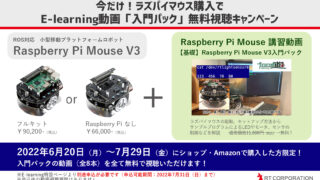 Raspberry Pi Mouse
Raspberry Pi Mouse