 Raspberry Pi Mouse
Raspberry Pi Mouse ROSCon JP 2021に出展しました<展示内容レポート>
アールティはロボット開発用ミドルウェアROS(Robot Operating System)の開発者会議「ROSCon JP」を毎年応援しています。
2021年9月16日(木)に両国で開催された「ROSCon JP 2021」にもシルバー...
Raspberry Pi Mouse 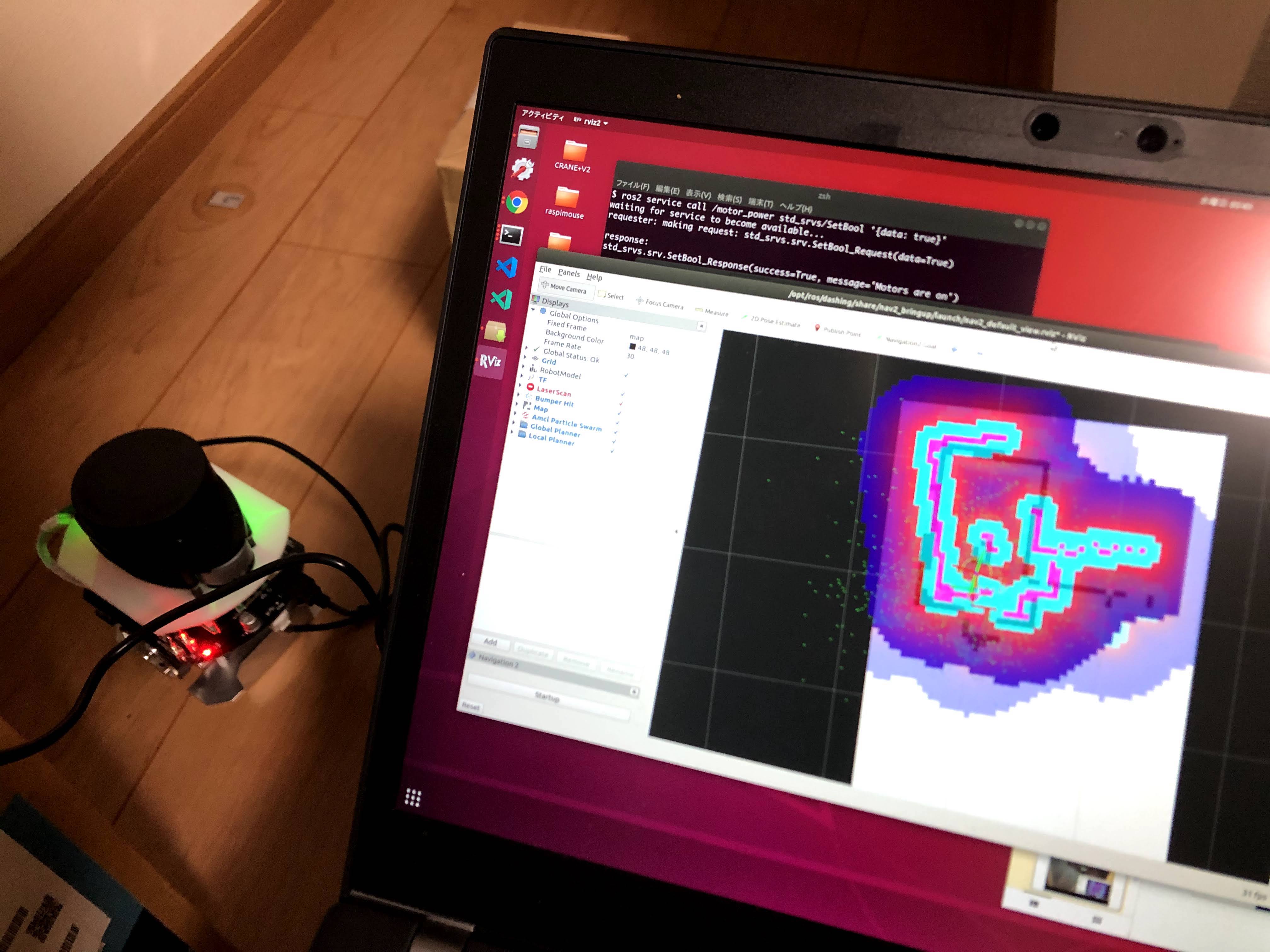 Raspberry Pi Mouse
Raspberry Pi Mouse  ROS
ROS  Raspberry Pi
Raspberry Pi 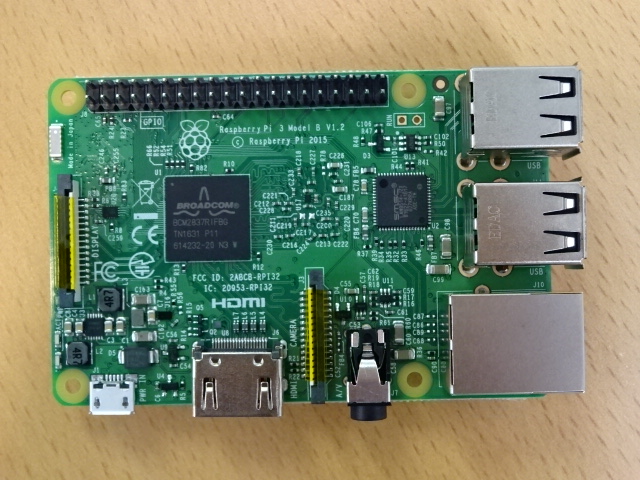 Raspberry Pi
Raspberry Pi