 ROS_CRANE+
ROS_CRANE+ お知らせ色々
こんにちは、サナエです。最近色々とバタバタしておりましてちょっと目が回りそうな事もありますがありがたいです。
ROS_CRANE+ 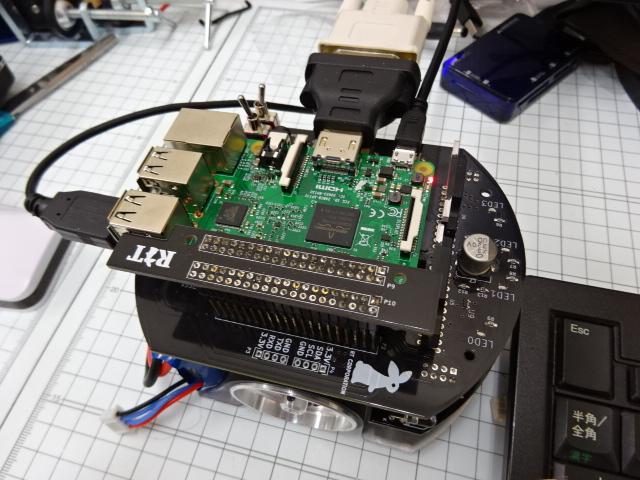 ROS_CRANE+
ROS_CRANE+ 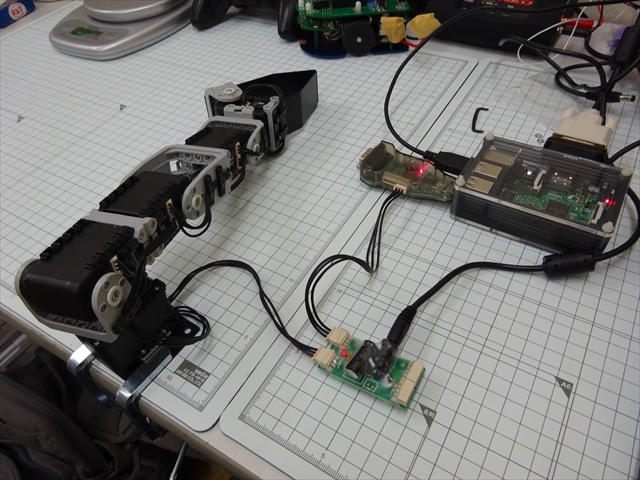 Raspberry Pi ROS_CRANE+
Raspberry Pi ROS_CRANE+ 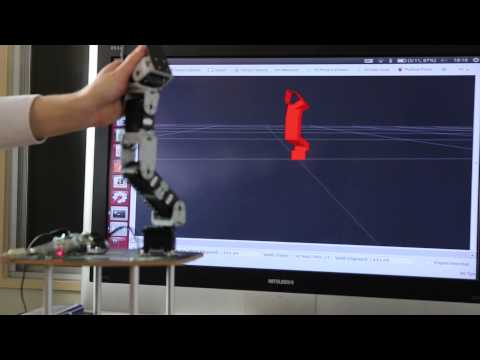 ROS_CRANE+
ROS_CRANE+  RoboCup@home ROS_CRANE+
RoboCup@home ROS_CRANE+ 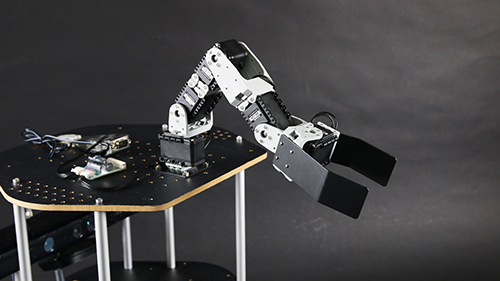 ROS_CRANE+ ROS_CRANE+
ROS_CRANE+ ROS_CRANE+  ROS_CRANE+
ROS_CRANE+