ドーモ Seijiです。
前回サーボモーターをざっくり分類してみましたが、今回はその続編です。
サーボモーターとコントロールボードを繋ぐ時に必ず現れるコネクター。これはメーカーや信号の種類で変わってきますがあんまり法則性はないです。
PWM、ICS、TTLで動くものは3ピン、RS485のものは4ピンというのはだいたい決まってきます。
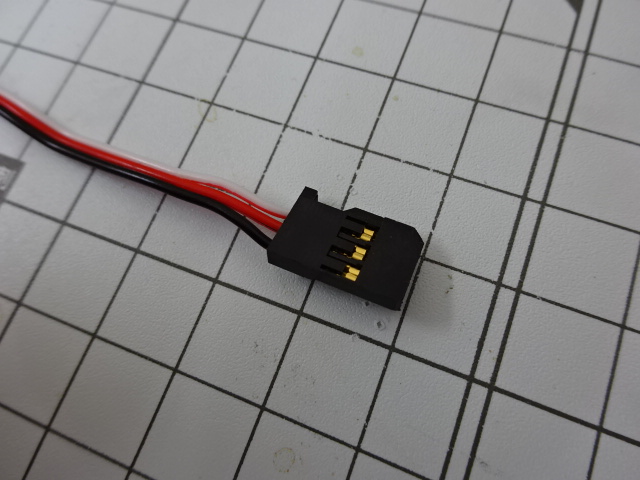
スタンダードなとこはこれ、平型3Pって呼ばれたり2550コネクタとか呼ばれています。
PWM制御のサーボは殆どこれ、近藤科学KRSシリーズや双葉電子工業のRS303MRや304MDもこのタイプです。
ROBOTISがこのタイプ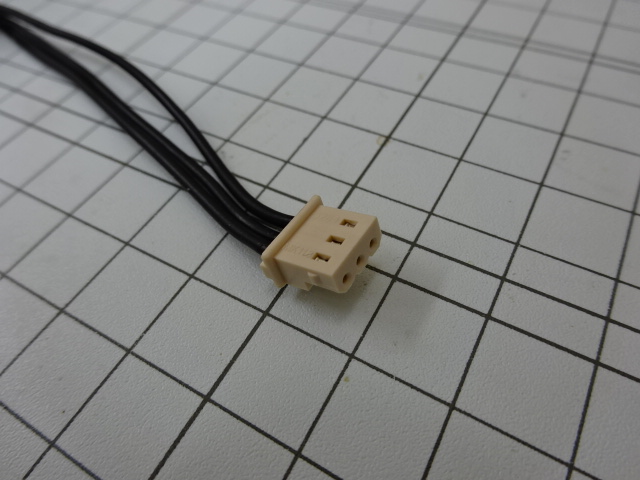
SPOXの50-37-5033ってコネクタ、4ピンのものは50-37-5043です。あとターミナルも必要ですね。
同じROBOTISでもROBOTIS-MINIはまた違うコネクタ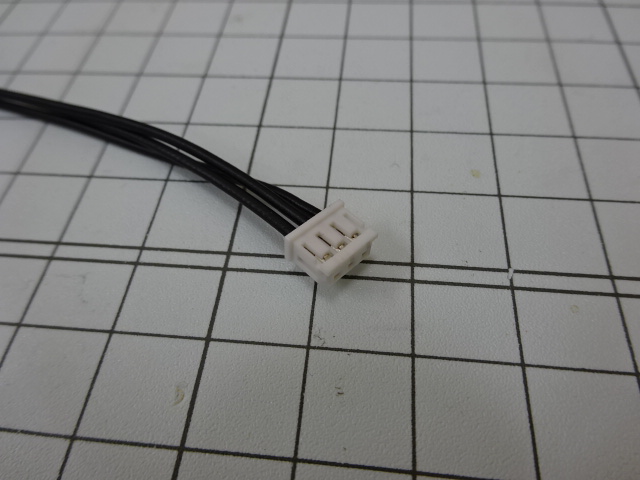
使ってるサーボに合わせて小型のコネクタで3ピンです。
さらにROBOTISのXMシリーズも別のコネクタ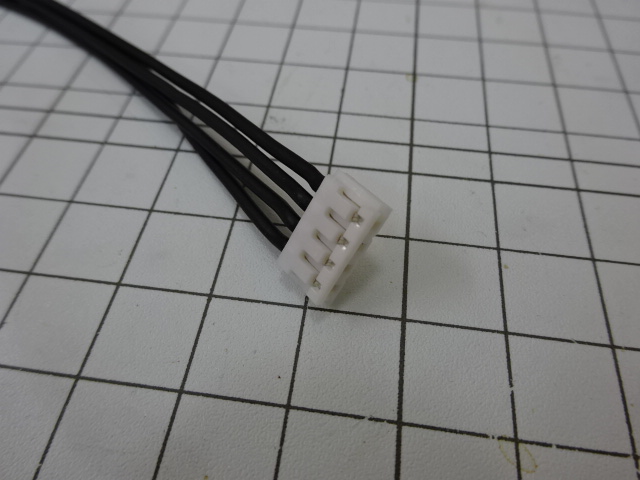
EHコネクタですかね、このコネクタは双葉電子工業のRS405CBも使ってます。
この他にもZHとかXHコネクタを使っているものもありますので、自分の使っているサーボに合うハウジング、ベースピン、ターミナルを使いましょう。「入れたら入ったからこれでいいや」は間違いなく事故ります。故障や発火は起こさないのが一番です、ちゃんと使えばそうそう起きたりしないのでちゃんとしたものを使いましょう。
コネクタ類やコネクタ付きケーブルはメーカーより純正品として用意されているので用途にあったものを使うのが安心確実です。
「コネクタがこのタイプだからこのサーボを使うぜ!」って話にはあまりならないと思いますが、選んだサーボのコネクタ形状でケーブルの取り回しが案外決まってくるので知っておいてもよいかと思います。
こういったケーブルやコネクタ類も各種ご用意しておりますのでぜひWebShopをご利用ください。
あー、コネクタ交換26個するの放置してるの思い出した…

