前回「第4回Choreonoid入門GR-001編 プロジェクト読み込みと接続確認」の続きを行います。
GR-001とPCの接続確認をして、サーボモータ励磁のON、OFFまで確認できました。
7.サンプル動作確認
GR-001用のサンプル動作がChoreonoidにはありますので、その動作まで行いたいと思います。
サーボモータの励磁のON/OFF時に姿勢が崩れてしまうかと思います。
そこで、もう一度直立の姿勢をさせてみようかと思います。
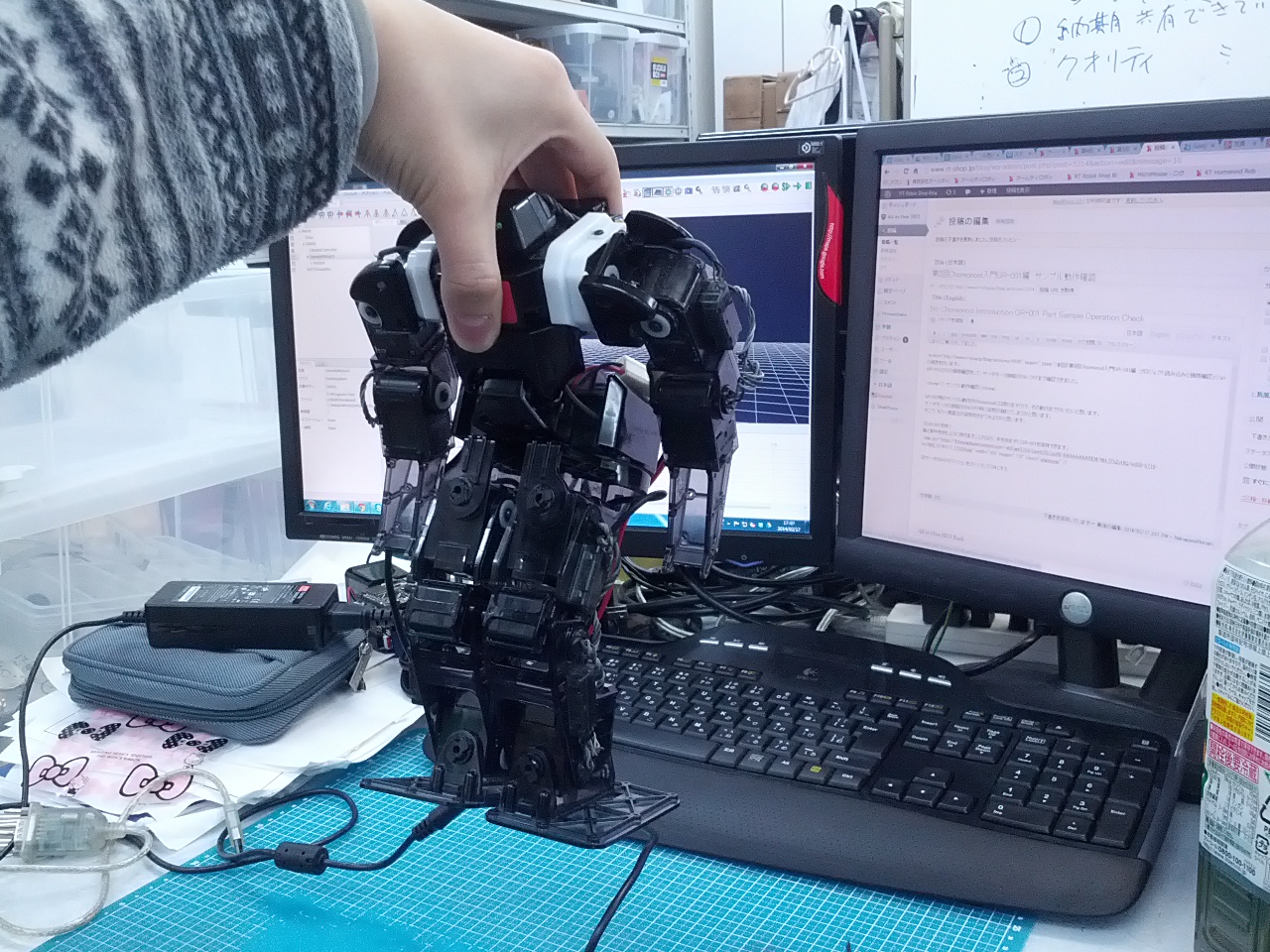
?GR-001を持つ
胸と背中を挟むように持ちます。これなら、手を挟まずにGR-001を保持できます。
コントロールボード「RPU-11」のSTART/STOPボタンを押さないように気をつけます。

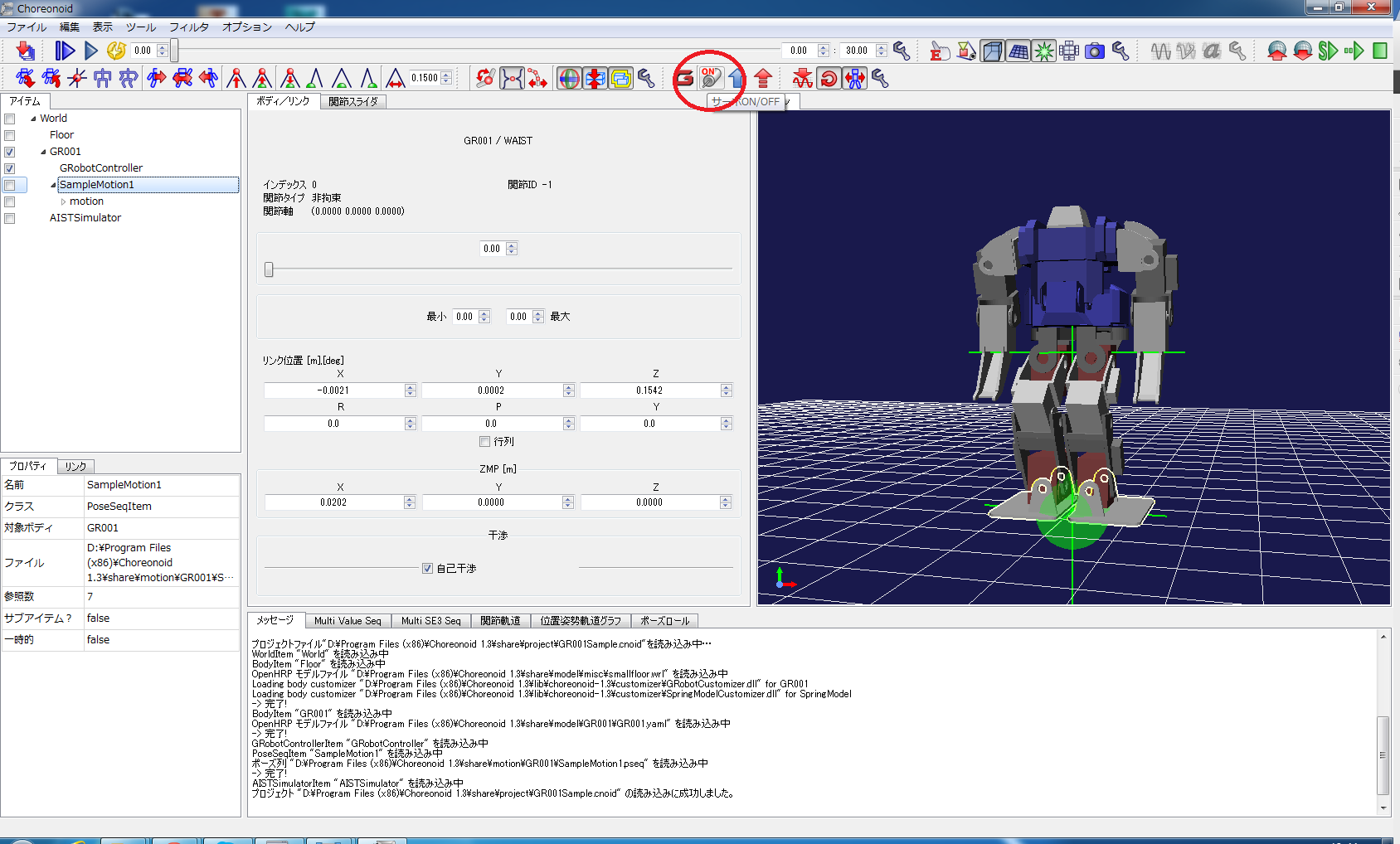
?サーボON/OFFアイコンをクリックしてONにする
GR-001のサーボモータが励磁して、固くなります。
(左足首ロール軸ID20サーボモータが、励磁のON/OFFが出来ないことがあります。そのときは、GR-001の電源を入れ直して下さい)
?初期姿勢アイコンをクリックする
シミュレーション上のGR-001を初期姿勢にします。
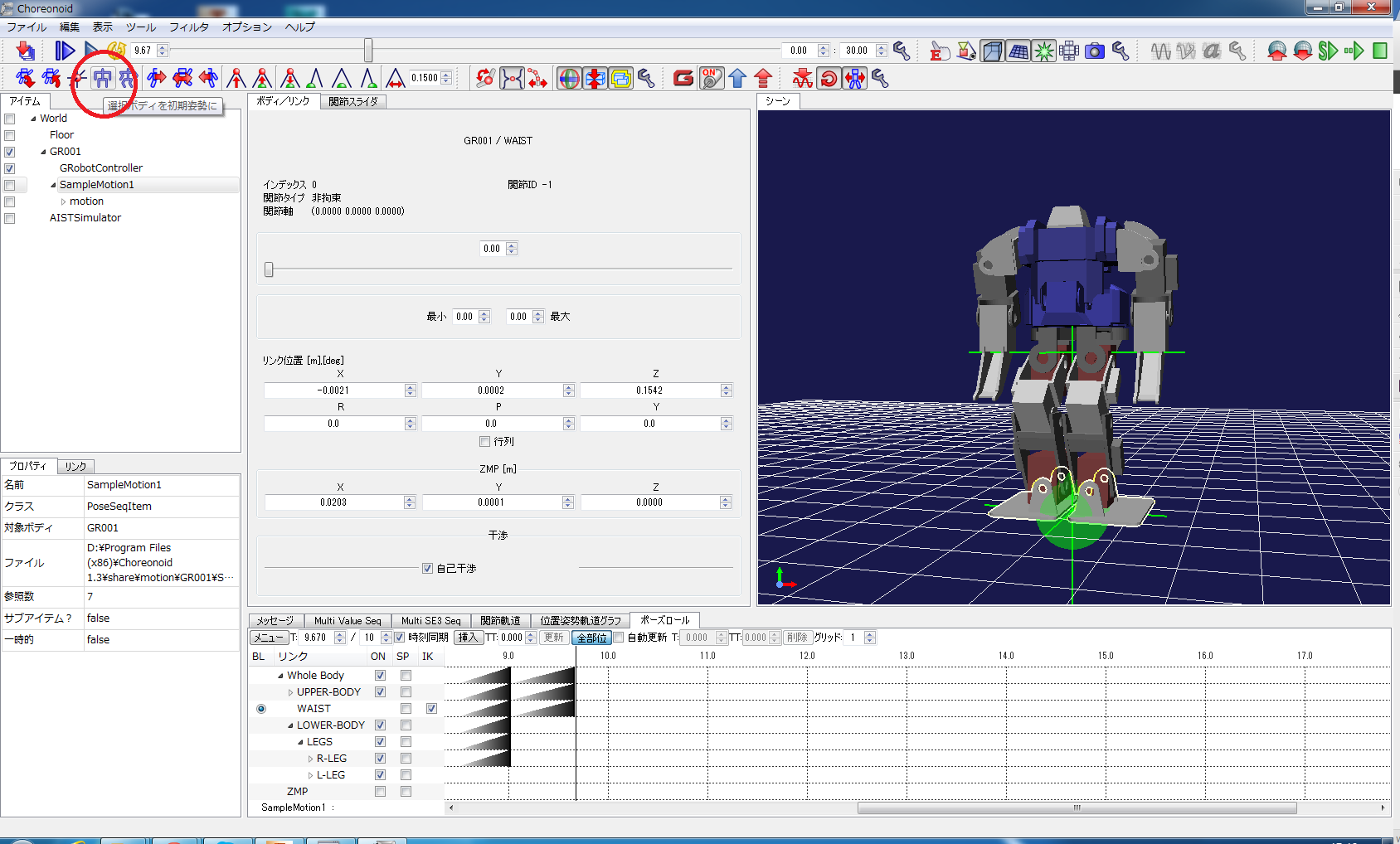
注意:ここから先は、GR-001が動き出します。手を挟まないよう気をつけます。
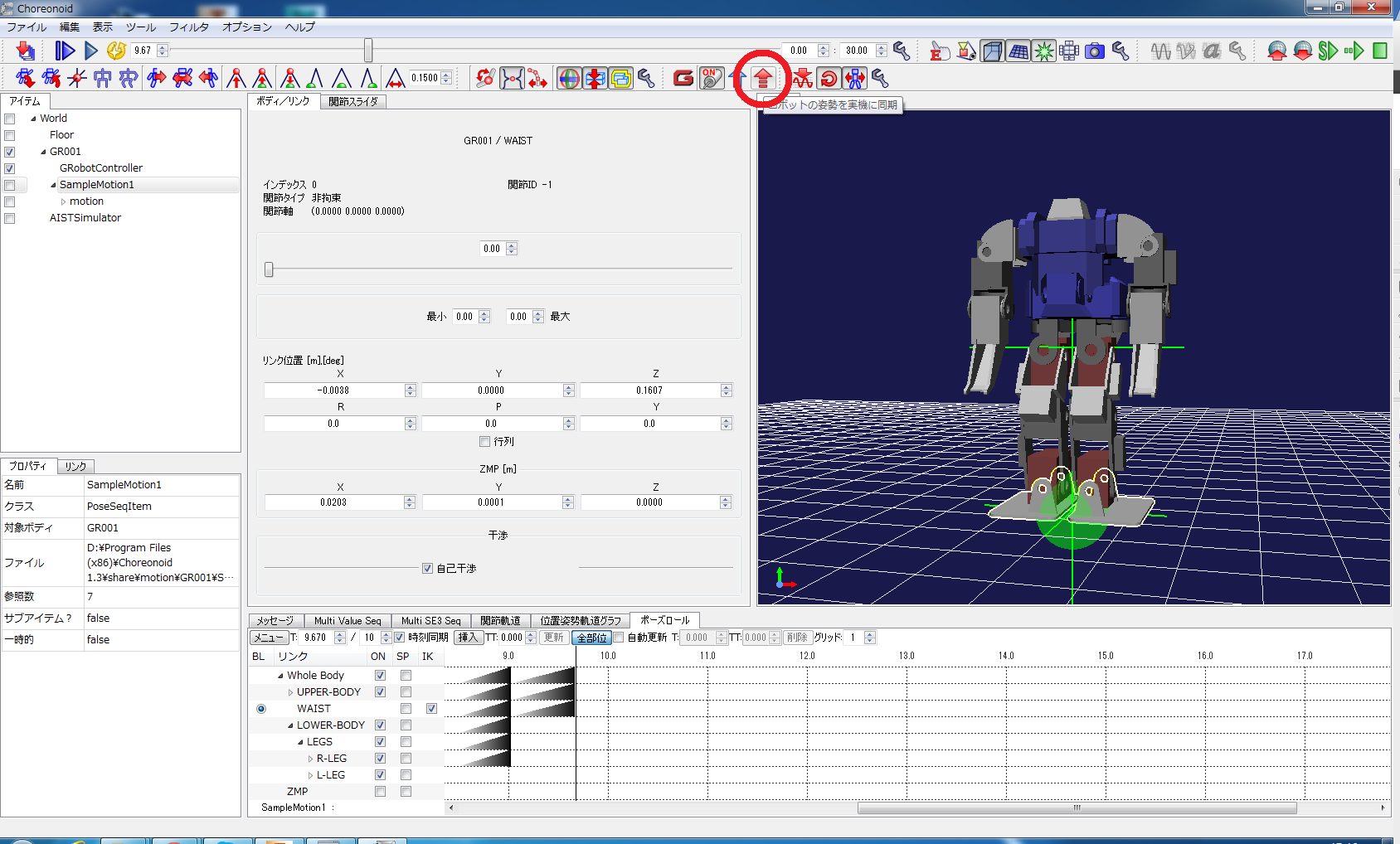
?姿勢送信アイコンをクリックする
青色の上向き矢印のアイコンをクリックすると、1秒位の速度でシミュレーションのGR-001の姿勢と同じ姿勢を、実機のGR-001が取ります。
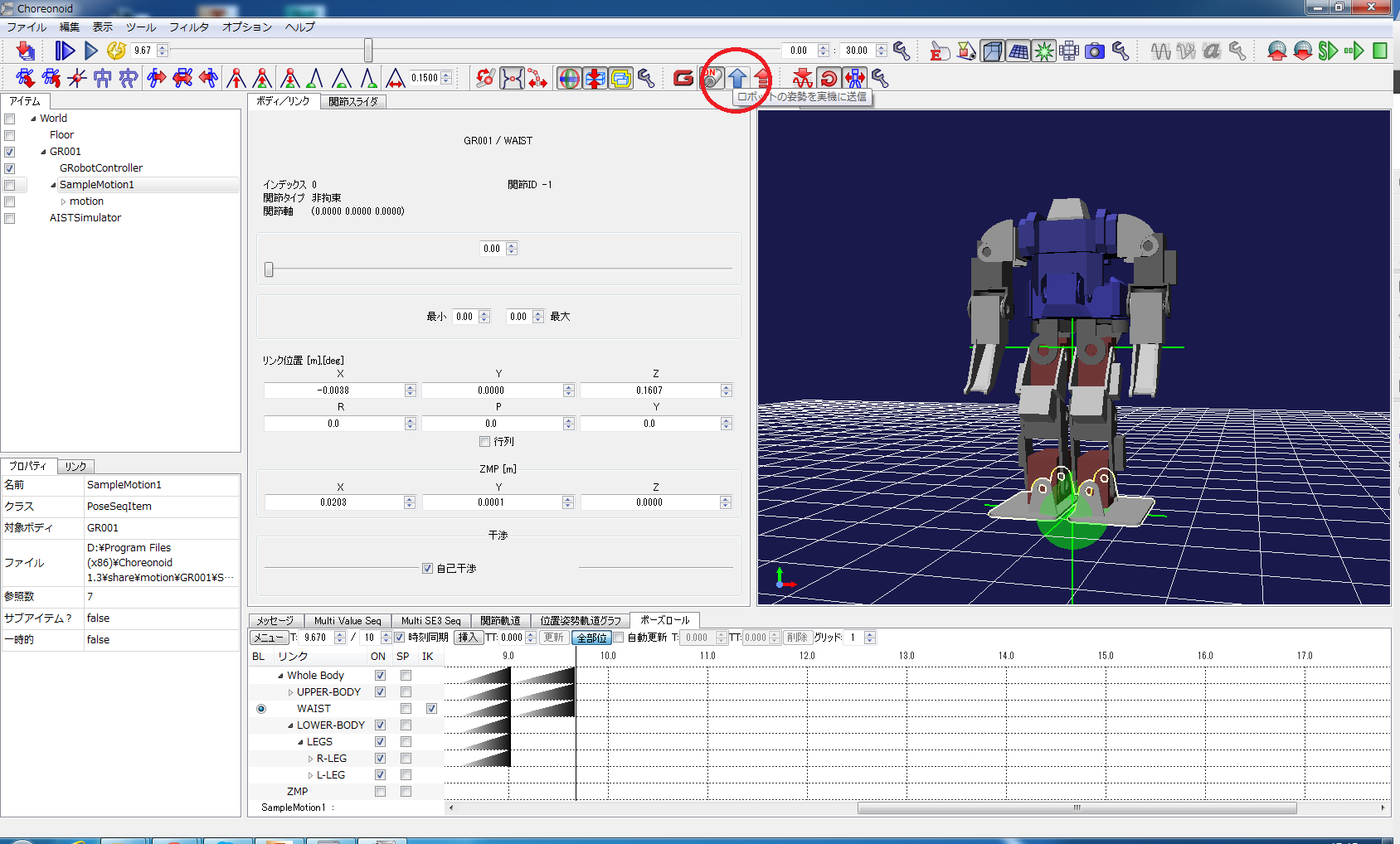
?GR-001を立たせる
初期姿勢になったので、手を離します。
?SampleMotion1をクリックする
サンプル動作のモーションを選択状態にします。
これから動かして行くことになりますが、まずGR-001がどのような動きをするのかを、予めシミュレーション上で見ておきます。
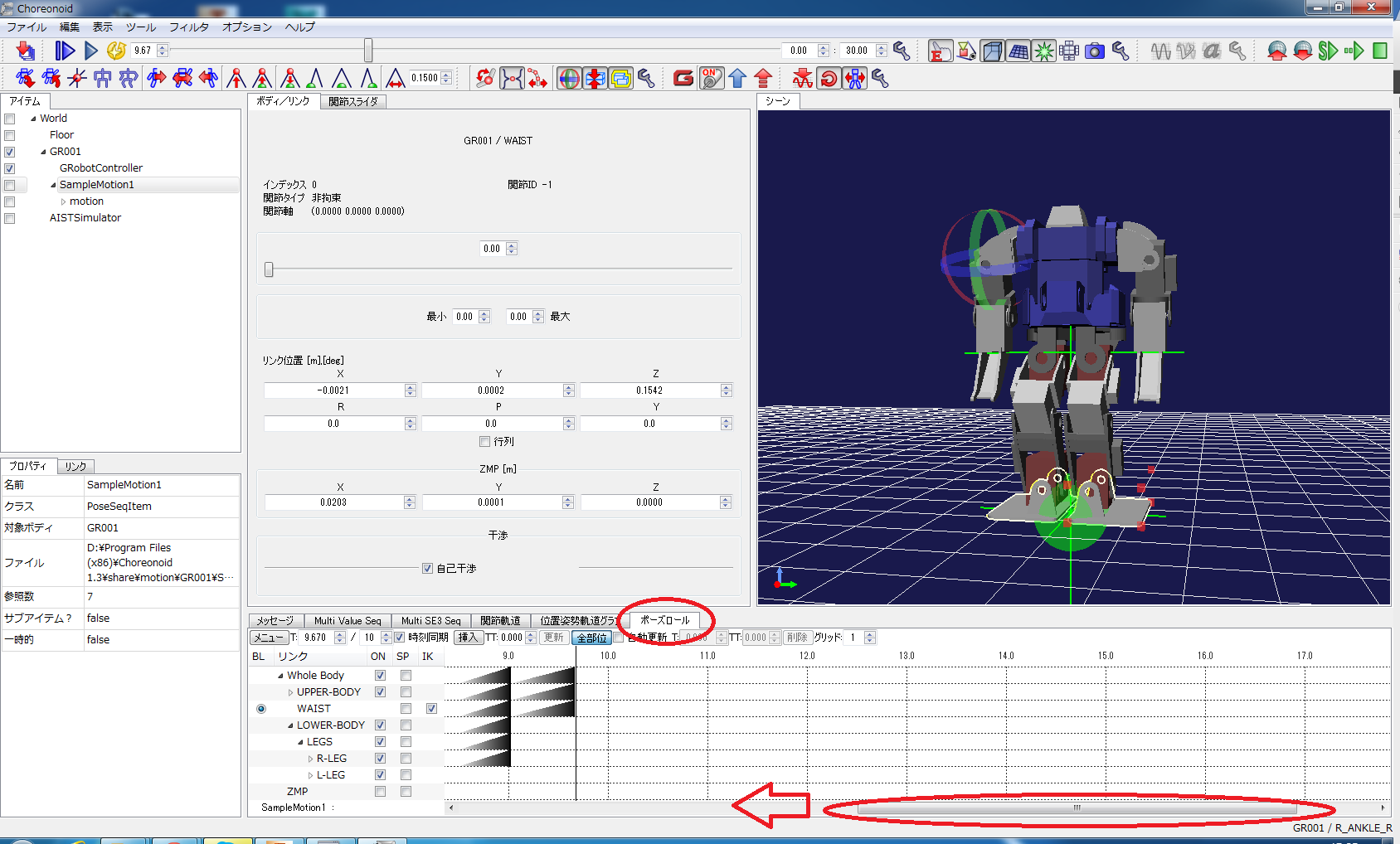
?ポーズロールをクリックして、スライダを左に移動する
ボーズロールは、ロボットの動きを時系列に記述していくところです。単位が秒で記述されているので、モーションを作りやすそうですね。
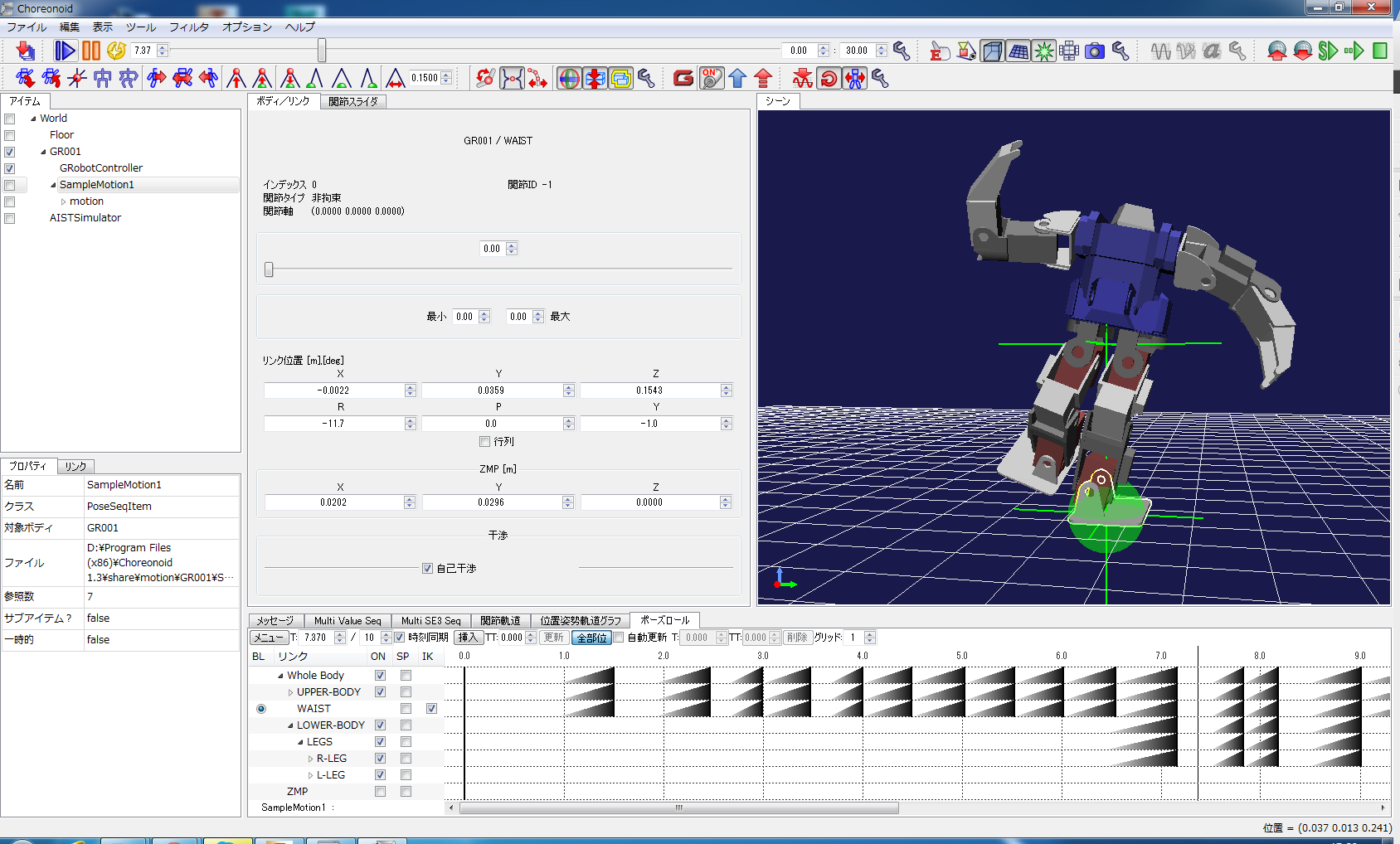
?アニメーション開始をクリックする
シミュレーション上のGR-001が動き出します。実機も同じように動くはずなので、覚えておきましょう。
?姿勢同期アイコンをクリックする
赤色の上向き矢印のアイコンをクリックしてON状態にしておくと、シミュレーションのGR-001と実機のGR-001が常に同じ動きをします。
実機で動作を開始するので、倒れないよう周りに手を置いて、倒れても支えられるようにします。
実機がシミュレーションと同じ動きをしないようであれば、すぐにロボットの電源を切って下さい。
?アニメーション開始をクリックする
動作を行います。
これで、サンプル動作の確認が出来ました。
次回は、Choreonoidの各機能をGR-001を使って試していこうかと思います。

