 マイクロマウス
マイクロマウス マイクロマウスのアルゴリズムについて?
佐倉です。
今回はマイクロマウスのアルゴリズムにについて書きます。
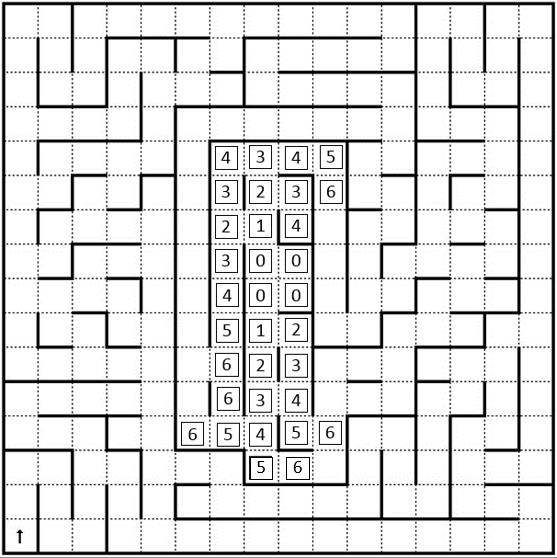
足立法を少しだけ拡張して迷路を完全に探索し切る、全面探索を行う方法をご紹介します。
マイクロマウス  マイクロマウス
マイクロマウス  マイクロマウス
マイクロマウス  技術ネタ
技術ネタ  技術ネタ
技術ネタ  技術ネタ
技術ネタ  技術ネタ 技術ネタ
技術ネタ 技術ネタ  ショップからの重要なお知らせ
ショップからの重要なお知らせ  ショップからの重要なお知らせ
ショップからの重要なお知らせ