佐倉です。前回まではマニアックな内容だったので、今回は反省してマウスをやっていない方や、始めたばかりの方の参考になりそうな内容にしました。
マイクロマウスで使われているセンサの基本的な話をまとめてみます。
マイクロマウスには機体の構成によって様々なセンサが搭載されますが、この記事では壁を見るためのセンサーについて説明していきます。
現在の壁を見るセンサの主流は、壁に向かってLEDを発光させてその反射光の強度を測定する物です。

マイクロマウスのほとんどは対向二輪型のロボットなので、進行方向に対して左右を見るセンサと、前を見るためのセンサの3種類を配置するのが一般的です。
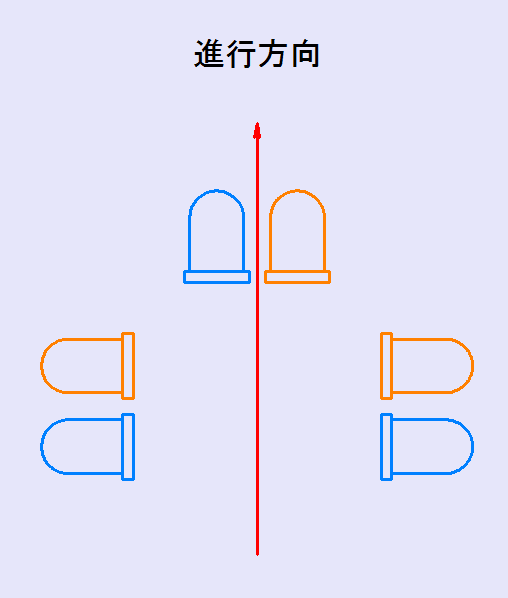
しかし、実際にこのような配置になっているマウスはほとんどありません。
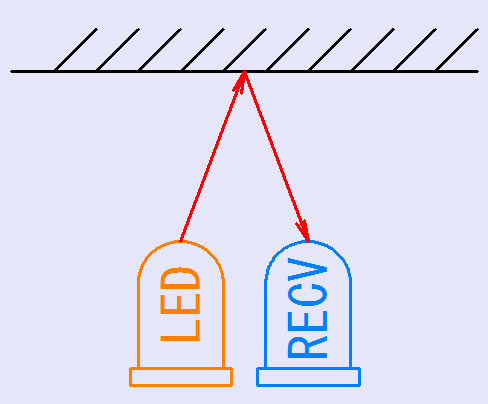
上に挙げた配置の最大の問題は、センサが壁と直角に配置されていることです。壁と直角に近い角度でLEDを発光させると、壁からの反射光は鏡面反射と呼ばれる非常に扱いづらい物になります。
そこで、鏡面反射に比べて扱いやすい拡散反射が受光側に帰ってくるように、センサを壁から傾けて配置するのが一般的です。また、前を向いているセンサは傾けた場合変な感じになってしまうのと、様々な使い道があるので、2個搭載しているマウスが多いです。
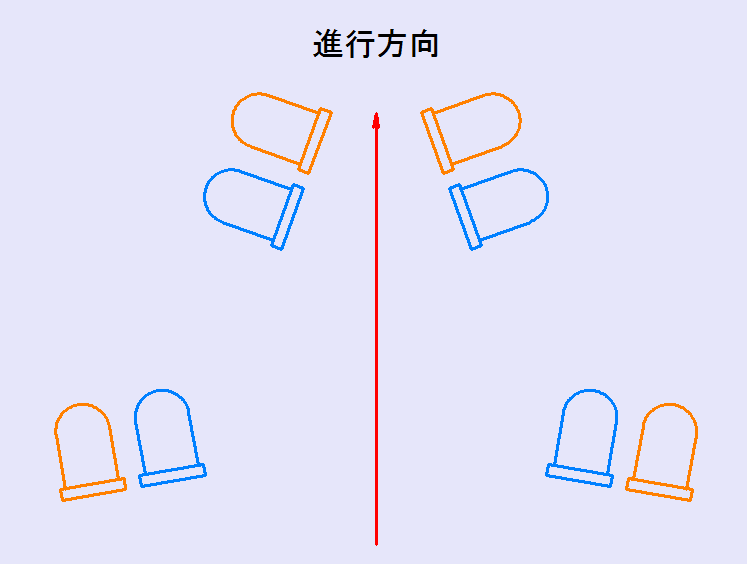
よく見るマイクロマウスのセンサ配置になりました。もちろんこれはあくまで無難な一例で、他の構成もあり得ます。
話は変わって、センサといえば外乱がつきものです。今回のセンサの場合は反射光を取得したいので、それ以外の成分は全て外乱ということになります。
このセンサで問題となる外乱は環境光です。普通の電子工作ではこのような場合、可視光カットの受光素子と、近赤外線のLEDを組み合わせる事になると思います。
しかし、マイクロマウスは会場がライトアップされたり、太陽光が差し込んでいる場合もあり、この程度の対策ではまともに動きません。
そこでマイクロマウスで使われているのは、変調した光をLEDから出し、受信した信号をフィルタして、その強度をはかるという方式です。電子工作だとパッシブなセンサはよく使っても、アクティブなセンサを使う事はあまりないので、電子工作から入る方にとって、このあたりはわくわくする所なのではないでしょうか。
さて、変調とフィルタリングを行うにあたって、周波数を決めなければなりません。外乱の取りそうな周波数を挙げてみると、次のような感じです。
- 太陽光 DC(0[Hz])
- 蛍光灯、ハロゲンランプ、放電管系 50,100[Hz]
- インバータ式蛍光灯、放電管系 50k?100k[Hz]
こんな感じです。こことかぶる領域を使用するのはやめたほうが良いでしょう。ただ、インバータ式の蛍光灯に関しては相当普及しているはずなのですが、観察できたことがありません。元々赤色近くの出力が弱いのと、蛍光体の応答で均されているのかもしれません。
0[Hz]?50[Hz]では遅すぎてセンサとして使い物にならないので、100[Hz]?50k[Hz]の間で使うのが良いでしょう。マイクロマウスでは1k[Hz]周期でセンサを取得するようにしている機体が多いようです。
今回はここまでです。次回はよく使われている変調とフィルタリングの様々な方法について紹介する予定です。
 Pi:Co Classic Pi:Co Classic |
 リポバッテリー(コネクタつき) リポバッテリー(コネクタつき) |
 C-01 Li-PO / Li-Fe 2-3セル ACチャージャー C-01 Li-PO / Li-Fe 2-3セル ACチャージャー |
