佐倉です。
今回からは数回に分けて、自分のマイクロマウスの設計過程をご紹介しつつ、(ついでに要望があったので)KiCadの実践的な解説を行います。
(KiCadの解説に入るのは、数回先からになりそうです。)
まず、マイクロマウスを作っていく際の私の中での流れをご紹介します。
- コンセプトを決める
- コンセプトを実現する方法を決める
- 設計する
- 作る、プログラムする
重要なのが1と2の部分です。
なんとなくロボットを作っているよりも、
「コレをやるためにこのロボットを作るんだ」
という気持ちでロボットを作ったほうが、まとまった物になります。
これが、コンセプトを決めるという部分です。
次は、コンセプトを実現する方法を決めるというターンです。
例えば、
「7分以内に月に行って戻ってきてからゴールするマイクロマウス」
なんてコンセプトを掲げても、現代には実現する手段がありません。
コンセプトが身の丈に合っているか、簡単な検証をする必要があります。
なんとか実現できそう、くらいの雰囲気で挑戦するのが一番楽しめると思います。
次に、設計と作成です。
このあたりは回を重ねながら書いていきます。
参考になるかはわかりませんが、歴代の私のマウスのコンセプトをご紹介します。
・マイクロマウスに参加するにあたってのコンセプト
人工知能が好きだったので、迷路探索に惹かれて参加しました。
人工知能や、自律的な機能と呼ばれるような部分に力を入れて参加しています。
タイムを競う競技会なので、速く走るというのももちろんコンセプトの1つです。
・さくらねずみ1
最初のマイクロマウスです。
コンセプトは最初なのでがむしゃらに作っていて、あまりありませんでした。
しかし、迷路探索に惹かれて入った事もあり、
全日本大会フレッシュマンクラスでは、最短経路が出るまで探索を続けるアルゴリズムを実装しました。
・さくらねずみ2
資料が何も残っていない、初のDCモータを使ったマウスです。
高価なDCモータが買うのが嫌だけれど、DCモータに挑戦したい という事で作成しました。
特にコンセプトがなかったように思います。当然開発は空中分解し、機体も写真も残っていないという有り様です。
・BasicMice
BasicMouseという、初心者のデファクトスタンダードなマイクロマウス(設計資料)があります。
BasicMiceは、BasicMouseの設計の古い部分を改定した、Mice(当時所属していたサークル)のためのBasicMouseです。
コンセプトは、シンプルで堅牢でドキュメントがある事。
作成後、数代、後輩のためのサンプルとして使われました。
シリアル通信や、モータを回すなどの軽いプログラムのサンプルも作成しました。
作成過程をまとめたページや、回路図などのドキュメントも作成し、今でも使われているようです?
・さくらねずみ3
探索中に既知区間を斜め走行をしている海外勢がうらやましく、自分も実装してやろう というコンセプトのマイクロマウスです。
探索中に斜め走行をするために、ソフトウェアのアーキテクチャというような部分から真剣に設計を行いました。
が、使っていたマイコンのRAMや処理性能の制約で、探索中の斜め走行には難がありました。
ただ、良いアーキテクチャ設計ができたため、走行が綺麗に行き、大会で良い結果が出ました。
・さくらねずみ4
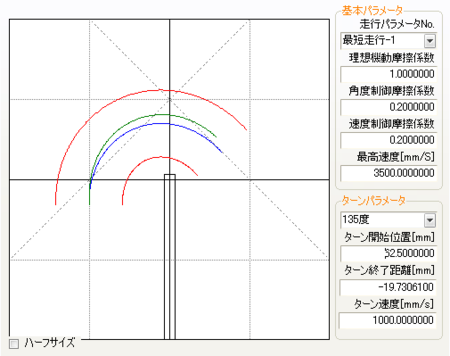
さくらねずみ3で、ターンの調整が面倒だったので、簡単に調整できるように作ったマイクロマウスです。


PC側のソフトウェアを充実させ、モニタリングやターンの微調整などを簡単に行う事ができました。
しかし、機体の設計がぜい弱で、ハードウェアの面で調整にやさしいマイクロマウスではありませんでした。
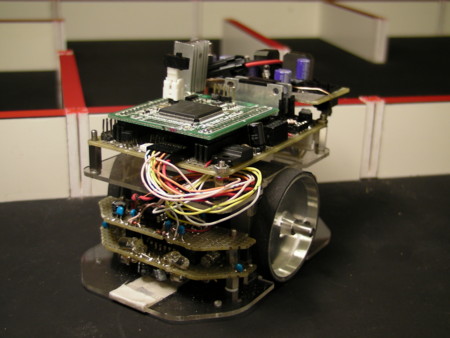
・さくらねずみ5
さくらねずみ3で探索中の斜め走行を達成できていなかったので、続きのために作成したマイクロマウスです。
3年かけて目標を達成しました。
私はこんな感じでやってきました。
コンセプトを決めてやると、達成できた時の喜びも格別です。
さくらねずみ5は、最短走行でそこそこ速く走りますが、
コンセプトが探索走行中の斜め走行なので、探索走行を見ている時が一番楽しかったりします。
今回は設計の初期段階、コンセプトの部分について、例を挙げながらご紹介しました。
次回は、今回解説しながら設計していくマイクロマウスのコンセプトの発表と、設計のとっかかりを記事にする予定です。
 Xtion PRO LIVE Xtion PRO LIVE |
 ちょろ丸 |
 RT-ADK&RT-ADS RT-ADK&RT-ADS |