 商品紹介
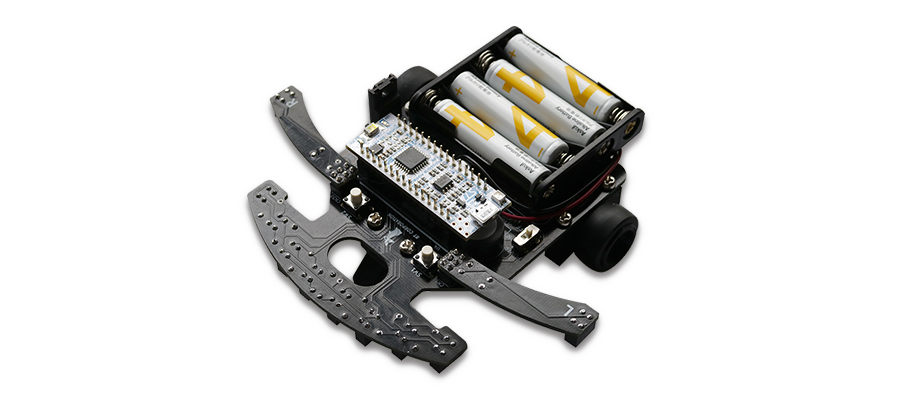
商品紹介 新製品 トレーニングトレーサー
アールティからライントレースロボットのキット「トレーニングトレーサー」を発売します!※ 5月中旬出荷予定先行予約(特典付き)を開始しました。 弊社ロボットショップよりご予約いただけます。6月1日追記:先行予約or発売記念のキャンペーンは5月...
商品紹介 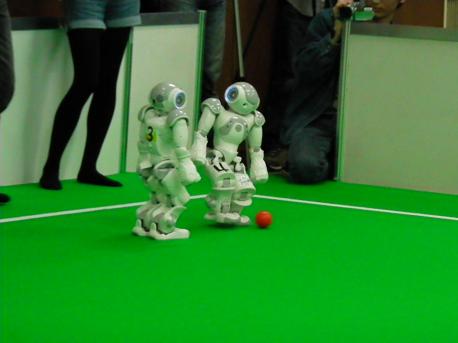 2足ロボット
2足ロボット 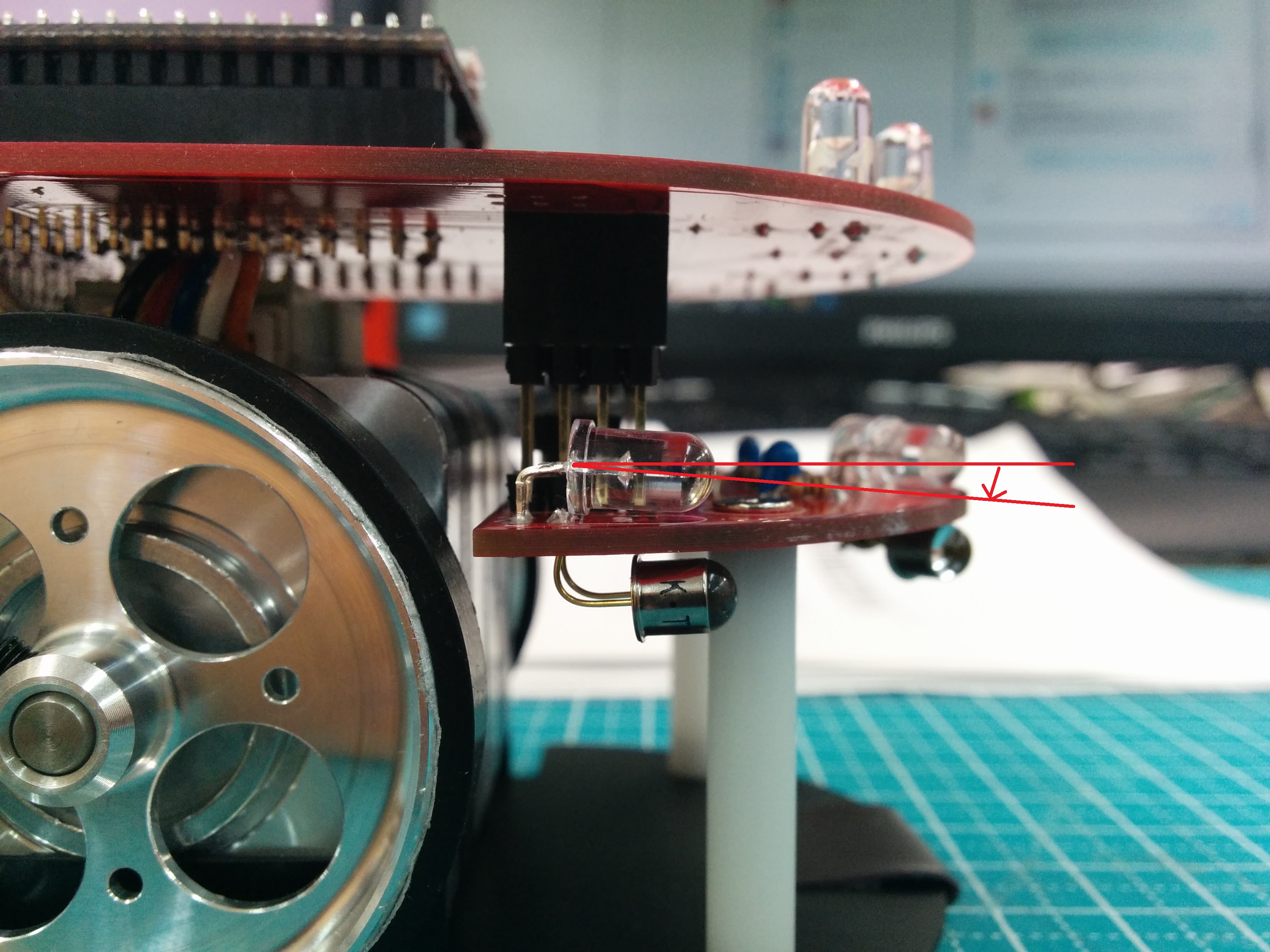 マイクロマウス
マイクロマウス 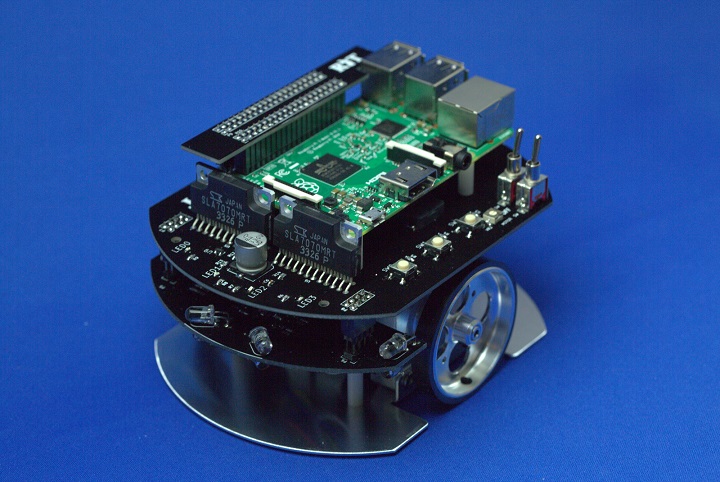 新製品情報
新製品情報  ショップからの重要なお知らせ
ショップからの重要なお知らせ  技術ネタ
技術ネタ  新製品情報
新製品情報 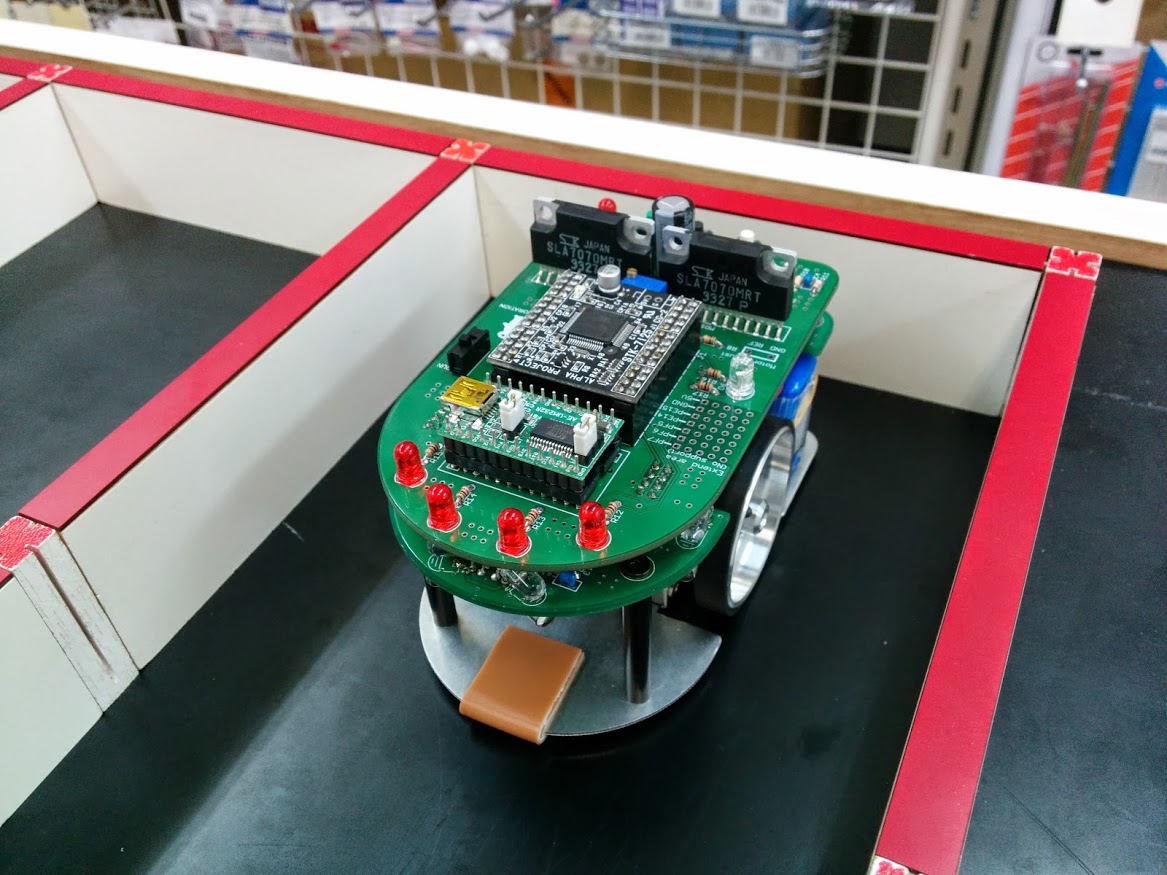 2足ロボット
2足ロボット  2足ロボット
2足ロボット  ブログ
ブログ