ドーモ Seijiです
前回の記事で「 ICS変換基板を使ってみよう(製作編)」をやり、ArduinoからICSデバイスを動かす環境が出来たので、今回は動かされる側を用意します。
使うのは4月に発売されたKXRアドバンスセットAです。高出力でメタルギヤ搭載のKRS-3304 ICSが6個セットされていたり4脚や恐竜型が作れるパーツもセットされてたりするお得なバージョンです。
今回はスタンダードに18軸2足タイプのKXR-L2Gというタイプで組み立てていきます。(Leg2,Gripperの略かな?)
KXRシリーズのマニュアルや付属CD等がメーカーより公開されているのでご購入を検討される際の参考になるでしょう。アドバンスはまだ公開されていないようですがL2用が参考になるかと思います。
KXRシリーズの特徴として今まで慣れ親しんでいたアルミ部品がありません。オール樹脂製のパーツになっています。その樹脂も部所によって素材が変えられておりなかなかおもしろい構成です。
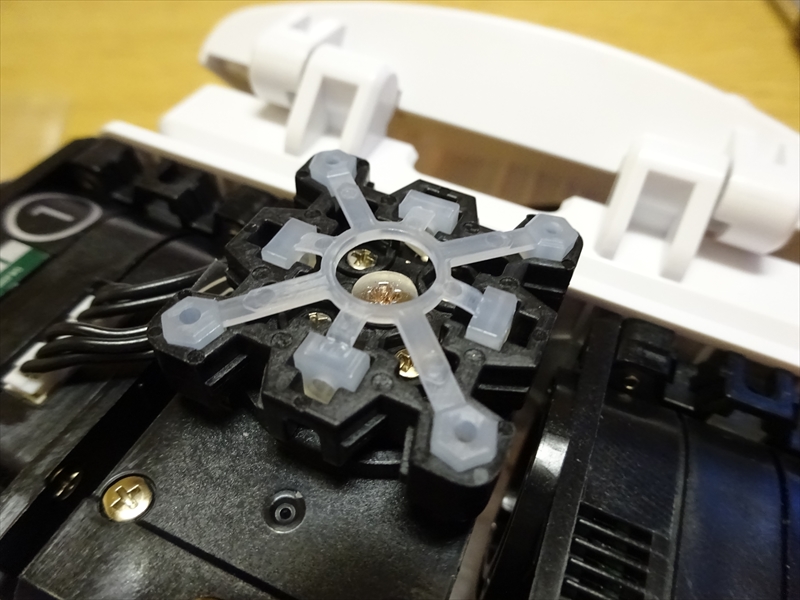
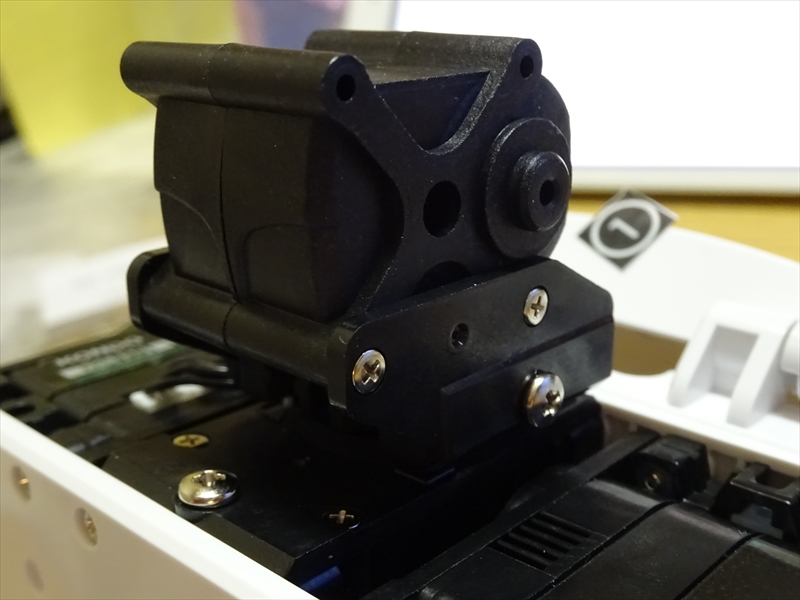
さらにナットもありません ジョイントベースにジョイントナットを入れてユニット化して、各フレームをネジ止めしていくスタイルです。
これがジョイントベース
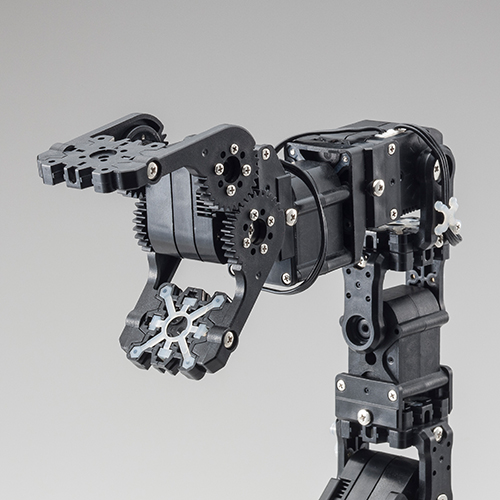
組み立て例
組んだりバラしたりしていろいろなカタチに組み替えて学ぶというコンセプトには良い構成ですね、ナットポロポロは面倒ですし初めて組み立てるという方にも作りやすいです。ただ、ネジ受け側が樹脂になっているので締めすぎると舐めてしまうので、ここだけは注意が必要です。
組立説明書もネジの締め方までしっかり解説されているので初めての方にも配慮された構成になっています。
事前準備として他にサーボIDの設定があります。ここではPCを使うのでWindowsPCを用意してDualUSBアダプターHSのドライバーを導入しておきます。IDの配置はマニュアルのP15に記載されており左右で同じIDを使うので、付属シール○と□で分けておきます。
また、説明書でわかりにくかったのですが、USBアダプター用ドライバー、ID書き換えに必要な「SerialManager」は付属CDに入っており、それぞれに説明書が入っているのでこれを読んで作業を進めていきます。
そしてこの時に付属の充電池を充電しておくと、組み上がった時にすぐ使えます。充電は付属の充電器で1時間程度で完了します。
この充電器はUSBで給電して使うのですが絶対にPCのUSBポートから給電してはいけません、PC故障の原因になります。
ただ、電源は付属していないので、スマートフォン等の充電によく使うUSB電源アダプターを使いましょう。5V2A程度のもので大丈夫なようです。
ここまで済めばいよいよ組み立て開始です。
次回は実際に組み立ててみて気づいた点を書いていきます。
KXRシリーズは弊社WebShopにてお取り扱いしております。
皆様のご利用お待ちしております。
 【KXR アドバンスセットA 【KXR アドバンスセットA |
 KXR-L4T-R カメ型・ローバー型 KXR-L4T-R カメ型・ローバー型 |
 KRC-5FH 送受信機セット KRC-5FH 送受信機セット |