産総研のChoreonoid(コレオノイド)を使ってみようかと思いますので、その体験レポートを行います。
ちょっと長いので、シリーズとします。
入門で使用するロボットは、HPI社製GR-001です。
出典(Choreonoidホームページ、YouTube産総研チャンネル)
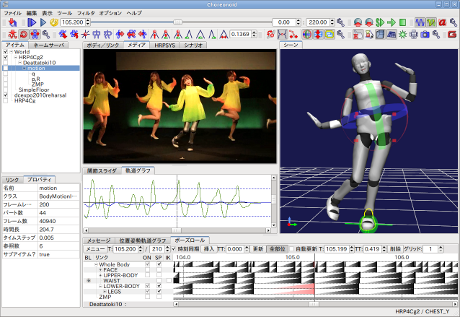
コレオノイド(Choreonoid)は、産総研の中岡慎一郎が中心となって開発している、オープンソースのロボット用統合GUIソフトウェアです。標準で動作振り付け機能や動力学シミュレーション機能を備えています。機能を追加していくことも可能で、「ロボット用GUIアプリケーション開発フレームワーク」という側面も持っています。
サイバネティックヒューマンHRP-4C未夢_ダンスデモンストレーション
人間型ロボットHRP-4_歩行・体操他
つまり、Choreonoidを使ってモデルデータやプラグイン等追加作成すれば、
自分のオリジナルロボットもこのソフトで動かすことができるようです。
動力学シミュレーションもできるというのは魅力的と思われます。
早速使ってみます。やり方は、ホームページに書かれていますが(以下、リンク)、
体験レポートなので、中川のコメントを入れながらやってみようかと思います。
0.用意する物
1.ロボット準備
2.ダウンロード
3.インストール
4.ソフト起動
5.プロジェクトの読み込み
6.接続確認
7.サンプル動作確認
0.用意する物
・G-ROBOTS GR-001 (RS303MR・ RS304MDサーボ仕様)組み立て済み

・USB RS232C変換器「USB2DYNAMIXEL」

・安定化電源「JO-ZERO専用外部電源ユニット」長時間使うので、バッテリよりこちらを推奨

・パソコン(中川は、Windows 7 64bit、Core i5を使います)

次回に続けます。
イベントのお知らせ
第9回U1Kを開催します。U1Kとは、1キロ以下級人型ロボットの大会のことです。(Under 1Kg)
日時:2014年1月12日(日)13:00?17:30
場所:アールティ秋葉原ショールーム秋葉原の人の多いところ
参加締切:2014年1月9日23:59
ぜひ、ご参加下さい。
 GR-001 GR-001 |
 USB2DYNAMIXEL USB2DYNAMIXEL |
JO-ZERO専用外部電源ユニット |

