ドーモ Seijiです
この季節の風物詩 「チロルチョコロボット大会12」 が開催されます。
今回はアスラテック株式会社様のご厚意で会場をお借りします ありがとうございますっ!
【概要】
チロルチョコの外装を持ったロボットによる運動会です。
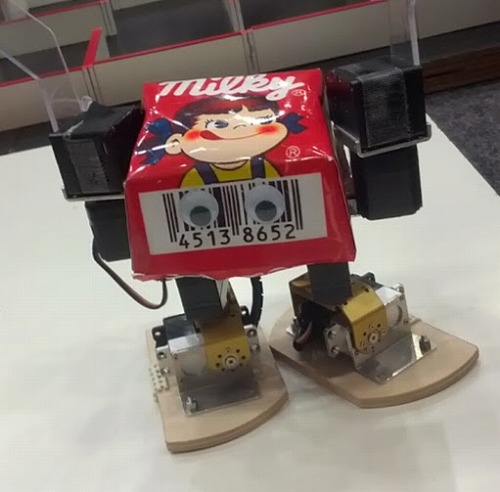
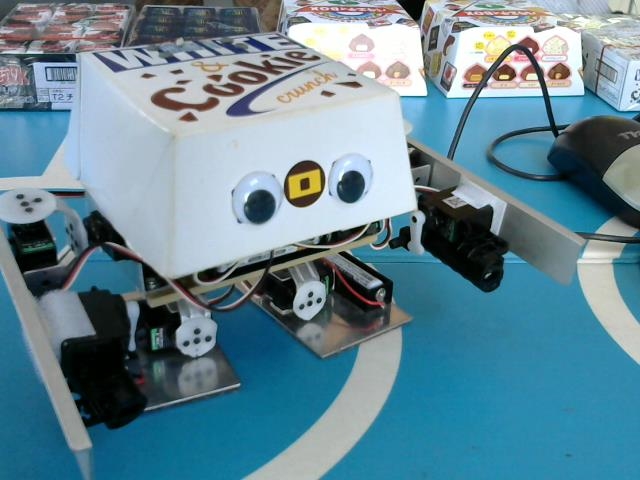
ロボットイメージ
開催日:2017年3月11日(土)
主催: まさゆき
後援: 株式会社アールティ, 株式会社アールティフォワード
協賛: チロルチョコ株式会社(調整中)
会場協力:アスラテック株式会社
機体規定は
以下の規格をすべて満たすこと。
【チロルロボット規格】
1. ビックチロルサイズである、底面(100mm×100mm)、上面(86mm
×86mm)、高さ46mmのチロルチョコを模した外装を装着すること。
上部に設置する「かご」を固定できる強度を確保すること。
2. 2足歩行ロボットであること。
ロボットの足に使用できる(サーボ)モータ数は、4個以下とする。
自律、有線または無線など、コントロール方法は自由とする。
【他規格での参加】
「ロボットの足に使用できるモータ数」以外は、チロルロボット規格
準拠であり、脚部に組み込まれたサーボの内、任意の4個以外は動作
しないようにすること。
機体構成は以前にまとめたBlogも参照ください。
チロルチョコロボット大会 傾向と対策 (歩行機構編)
今回は2種類の競技を行います。
・2m斜面ダッシュ
・チョコっとシューティング
競技の詳細は20日より開始となるエントリー受付時に公開される予定です。
「チョコっとシューティング」については以前Blogにまとめたので、そちらもご参照ください。
チロルチョコロボット大会 傾向と対策 (発射体編)
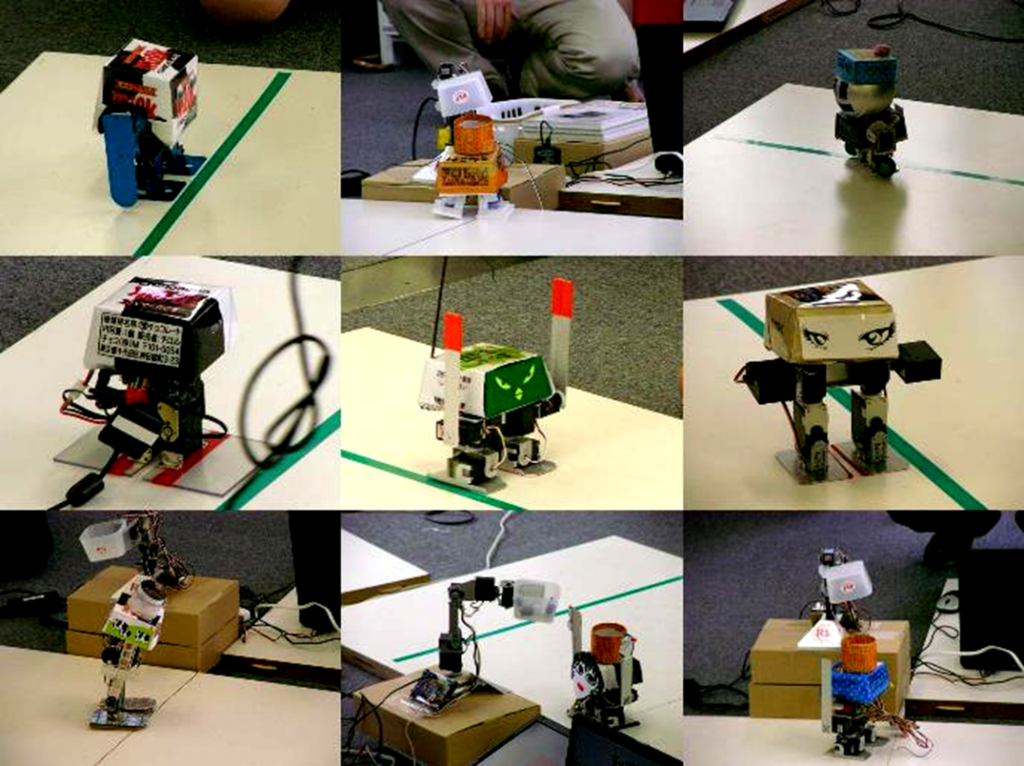
懐かしい第一回の参加機体たち
エントリーは2017年2月20日より受付開始予定です。
エントリー等はこちらの公式ページより行います。
チロルチョコロボット大会12掲示板
これからロボットを用意するのなら市販のフレームを使ったりすれば容易に準備が整うのもこのロボット大会の面白いところです。足の4軸をいかにうまく使って動くか? が重要、シューティングも移動できて初めて射撃出来るので。
皆さんのエントリーお待ちしております。
 G-ROBOTS アルミ足裏セット G-ROBOTS アルミ足裏セット |
 G-ROBOTS アルミボディセット G-ROBOTS アルミボディセット |
 KXR-L2 ヒューマノイド型 KXR-L2 ヒューマノイド型 |

