こんにちは、関東地方はすごい台風でしたね。
台風被害やライフラインのストップにあわれた方には、早い復旧をお祈りしております。
マイクロマウス東北地区大会の懇親会で食べ過ぎ、飲み過ぎで太って帰ってきたyukiです。
山形県長井市で行われたマイクロマウス東北地区大会では、マイクロマウスクラシック競技7台のうち5台がPi:Co Classicという状況で、「なにはともあれ、まずは参加!」という方が増えてうれしかったです。
さて、今回は山形県長井市のスタッフの皆さんが作られたPi:co ClassicとRPiを組み合わせた機体で、良いデモがあったのでご紹介させていただきます。
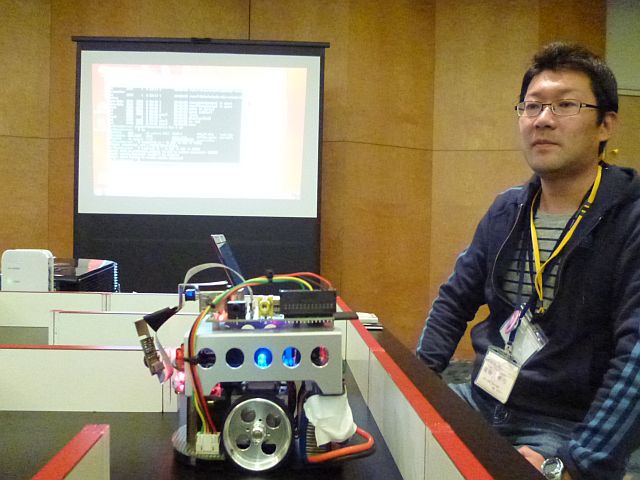
ここではRPiとPi:co Classicが合体して素敵なことになってました。(写真)
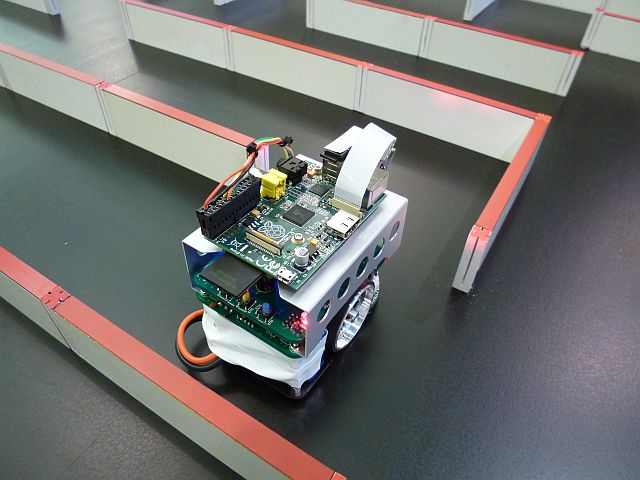
RPiは、無線LANドングル、純正カメラと組み合わされ、コントローラのサーバーとして搭載され、Pi:co Classicは移動台車として実装されていました。
Pi:co Classicはマイクロマウス競技でも実際に見ていただくとわかるように、キチンと整備すれば経路走行の再現性には定評のある機体です。(大会ではPi:Coは0.1秒台の誤差の範囲で同じ経路を繰り返しているところが見られます。)
こういったマイクロマウスなどの固定経路の観測やリモートビューイング用にはいい応用例ですね。
今回のシステムの構成ですが、RPiとPi:co Classicはシリアルケーブルで接続します。
Pi:co Classicのファームは、RPiからの信号からも動くようにモードとプログラムを書き換えます。
一方、RPiのほうは、web画像取得とコマンド受付用のボタンを配置した形でサーバーを構築します。
このようにして、マイクロマウス東北地区大会での一般向けデモ機体になっていました。
(写真手前が機体、奥のプロジェクターが移している映像がサーバーの表示。写っているのは担当の福田さん)

まぁ、RPiはリアルタイム画像サーバーには非力なので、画像表示の転送にタイムラグが大きいです。
皆さんは宇宙飛行士がロボットアームを操縦したり、地球からほかの惑星上のロボットをリモートコントロールしたりする映像を見て、ロボットが動くのがエライ遅いなと思ったことありませんか?
これは何を意味するかと言うと、観測にタイムラグがあるので、間違った作業をしてもミスを最低限に抑えるための措置の一環です。
また、人間は自分が観測、操縦するモノに対してのタイムラグが大きすぎると相当な訓練を積まないと動かせないことがほとんどです。
RPiの画像取得、転送は遅いので画像だけでPi:co Classicを操縦するのは至難の技かと思われます。w
それでも子供たちは遊びとして楽しめたようです。
そのあたり含めてRPiもPi:Co Classicもイロイロな実験に適した機体とも言えます。
皆さんもPi:co ClassicやG-Robotsなど弊社製品でこんな風に改造したよという方、ぜひご紹介ください!取材してご紹介したいです。
よろしくお願いします!
今回使われたものは、こちら!
 Raspberry Piの購入ページへGo! |
 RPi用カメラの購入ページへGo! |
 RPi用マイクロSDのカードホルダーの購入ページへGo! これ、RPiのでっぱりをコンパクトにできて超便利 |
 Pi:Co Classic |

