 その他のお知らせ
その他のお知らせ マイクロマウス迷路解放日のお知らせ(2025年 夏)
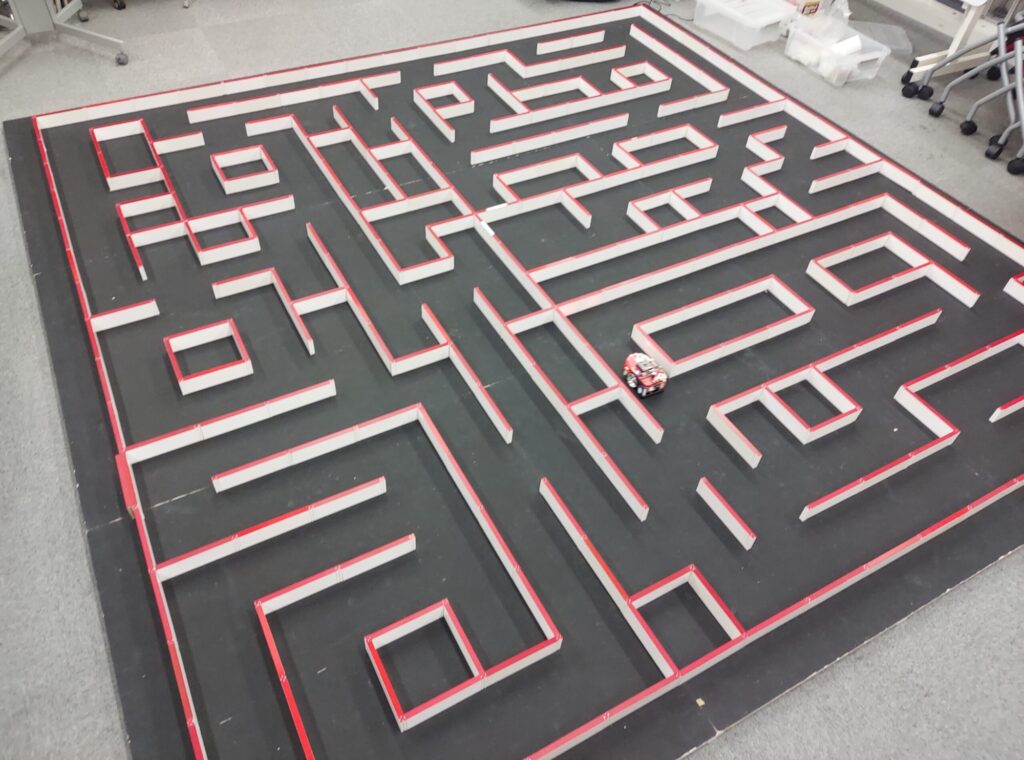
秋葉原のアールティセミナールームにて恒例のマイクロマウス迷路を開放します。
マイクロマウス競技用の迷路をご利用になりたい方はどなたでも参加可能!
開放時間中は出入自由です。
機体をお持ちいただいて走行・調整等にご利用ください。
なお、日...
その他のお知らせ  マイクロマウス
マイクロマウス  その他のお知らせ
その他のお知らせ  Raspberry Pi
Raspberry Pi  ショップからの重要なお知らせ
ショップからの重要なお知らせ  その他のお知らせ
その他のお知らせ  イベント情報
イベント情報  Raspberry Pi Mouse ショップからの重要なお知らせ
Raspberry Pi Mouse ショップからの重要なお知らせ  イベント情報
イベント情報