 商品紹介
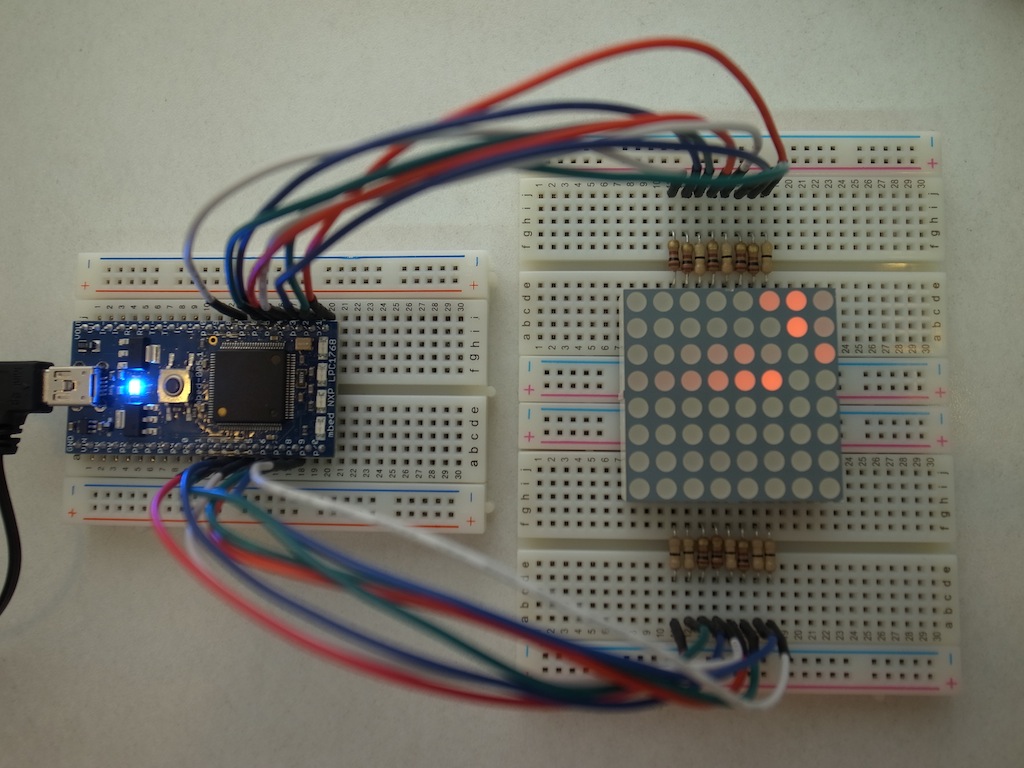
商品紹介 マトリックスLEDキットの使い方(mbed LPC1768編)
好評発売中のマトリックスLEDキットの使い方です。このページではmbed LPC1768での使い方を説明します。
準備
マトリックスLEDキットの内容
8x8マトリックスLED?× 1個
100Ω抵抗(茶黒茶 金) ×?10本 (こ...
商品紹介  商品紹介
商品紹介  商品紹介
商品紹介  ROS_CRANE+
ROS_CRANE+ 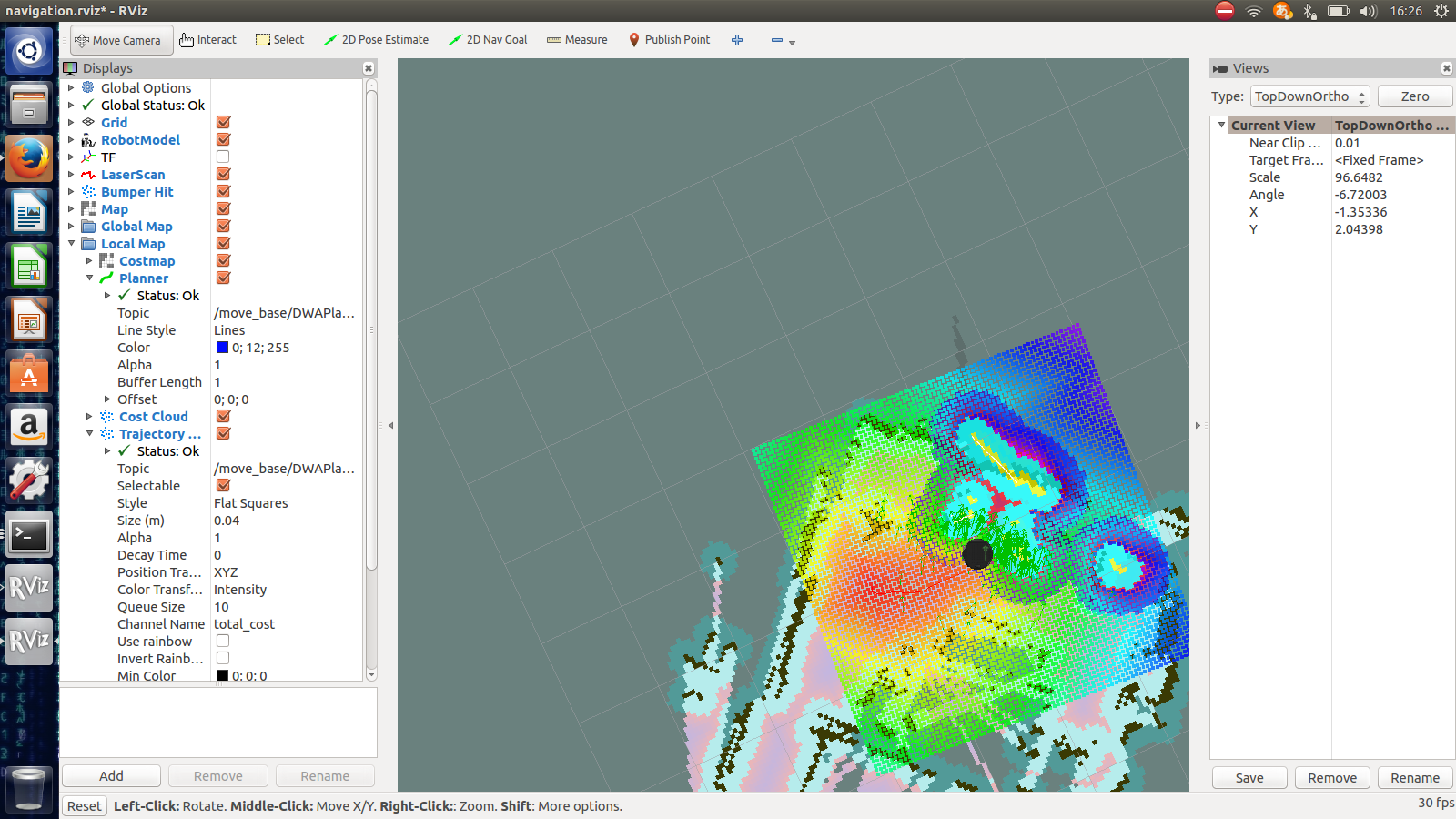 ブログ
ブログ  商品紹介
商品紹介  商品紹介
商品紹介  商品紹介
商品紹介  ROS_CRANE+
ROS_CRANE+  商品紹介
商品紹介