 ブログ
ブログ GAINERmini始めました intで代入編
梅雨真っ盛りで洗濯物を干す場所に悩ましい季節です。まだふわっとしたカビが生えるような湿度ではないですが、食べ物には気をつけよう。アテクシが腹がいたいと言い出したら最期と思え サナエです。
さてさて最近あまり見なくなったカタツムリのようにゆ...
ブログ 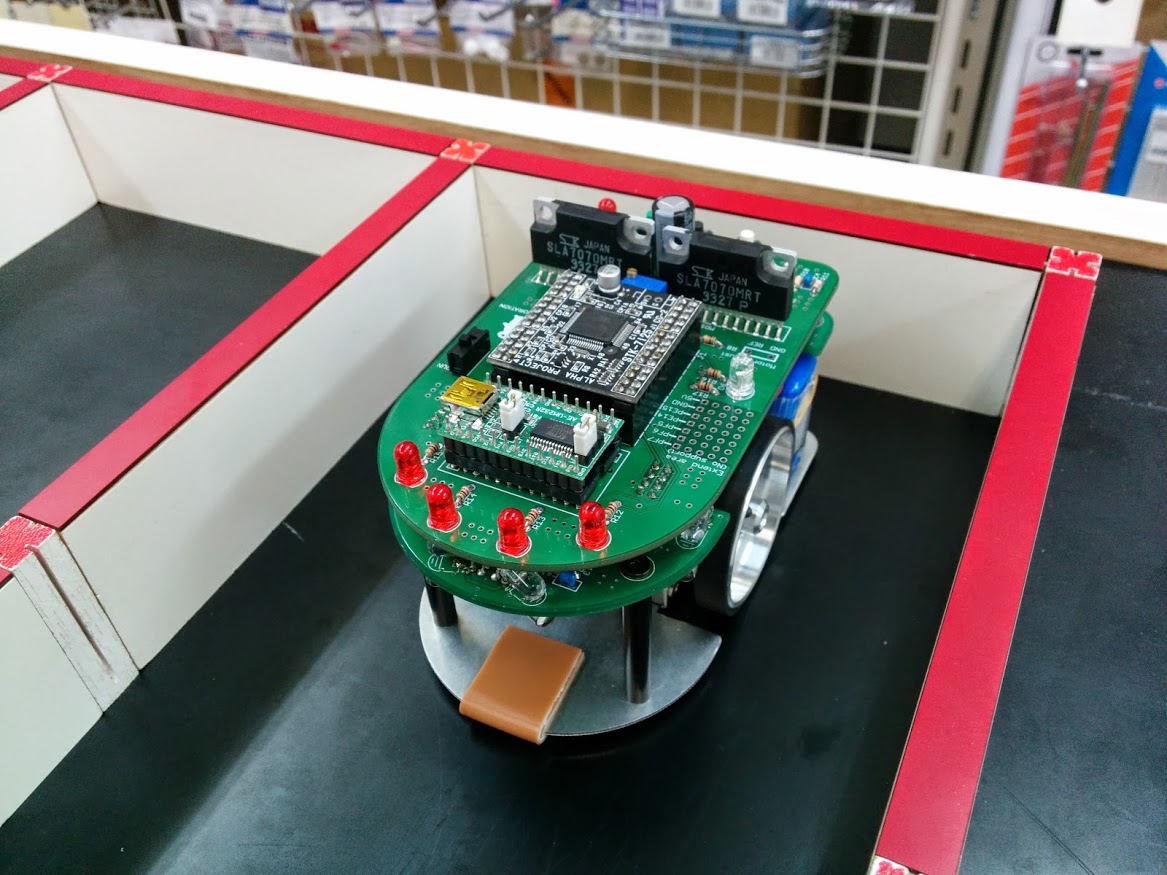 2足ロボット
2足ロボット  ブログ
ブログ  ブログ
ブログ  2足ロボット
2足ロボット  2足ロボット
2足ロボット  ブログ
ブログ  ブログ
ブログ  ブログ
ブログ  技術ネタ
技術ネタ