新人の佐倉といいます。
今後、日曜日のブログ記事を担当する事になりました。
私は学生時代にマイクロマウスというロボコンをやっていたので、マイクロマウスに関連した記事を書いて行きます。

さて、まずマイクロマウスの簡単な紹介をしたいと思います。下の動画を見てみてください。
中央の1箇所だけ大きく空いたブロックがゴールです。
2012年度のマイクロマウス フレッシュマンクラスの上位3名
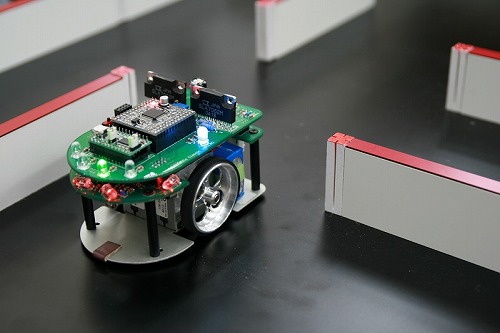
このように、マイクロマウスは未知の迷路を自律的に解くロボットです。
競技としては5回走行が可能で、その中で一番早く走行できたタイムを競います。
そのため、上位陣は軽量化や小型化、最速経路を求めるアルゴリズム(最短経路は1通りだが、最速経路はロボットの特性によって異なる)などで競いあっています。
興味が出てきた方は、2012年の大会の動画へのリンクを貼っておきますので、ぜひご覧ください。
マイクロマウスが他のロボット競技とくらべてユニークな部分を挙げると、
- ほとんどの参加者がメカ、電気、ソフトをすべて一人で、一から作っている
- 参加者が情報開示に積極的で、聞けば何でも教えてくれる
- ソフトウェアの比率が非常大きい
という点が挙げられます。
1と2に挙げたような環境なので、参加者の輪にはいってしまえばいろいろ教えてもらえます。
論文や企業の威信をかけたピリピリした雰囲気の大会ではない事も魅力の一つです。
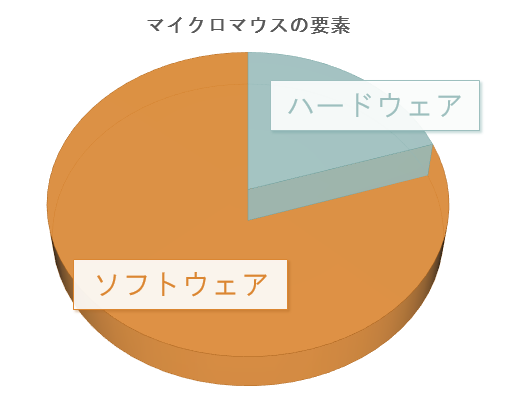
私の感覚ですが、マイクロマウスをハードウェアとソフトウェアの要素に分けたとしたら、比率はハードウェア2:ソフトウェア8くらいになると思っています。
ソフトウェアが得意な(になりたい)方にオススメの競技です。面白い上、勉強になるので是非参加してみてください。
2013年度の競技日程はこちらに記載されています。
次回以降は、マイクロマウスのシステムを俯瞰して見て行く予定です。
当社ではマイクロマウスの製作キットや部品の販売も行なっておりますので、是非ご覧ください。

