アールティでは,スイッチサイエンスさんの商品の取り扱いを行っております.
その中でも,自律系ロボットにオススメの商品を紹介します.

ロボットを自律化する上で,必ず必要になってくるのが,自己位置姿勢の推定です.
車輪型である場合は,自分がどこにいるのかという位置情報や,どの方向を向いているのかという姿勢を把握しておきたいものです.
2足歩行ロボットでは,位置推定はもとより,歩行時の揺れに補正を行なって,転けないよう安定した移動を行いたいですよね.
ということで,お手軽に実装できるデバイスがあるので,お手元のロボットに乗せて試してみてはいかがでしょう.
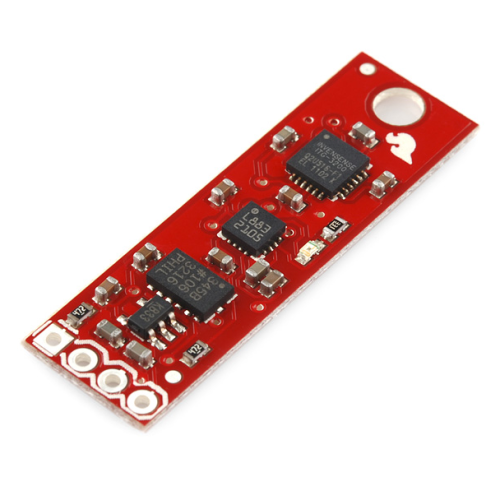
組込みボードで動かしているロボットでしたら,I2Cタイプの
IMU ナイン・ディグリーズ・オブ・フリーダム-センサースティック
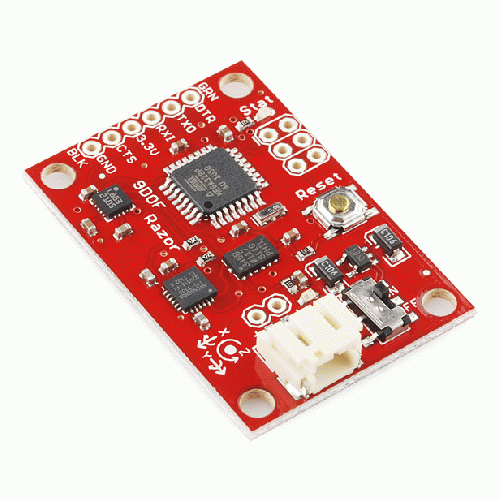
パソコンで動かしているロボットでしたら,UARTタイプ(USB変換ボードを付ける)
超薄型IMU「9DOF Razor」+FT232RL搭載小型USB-シリアルアダプタ 3.3V
直ぐに制御に取り入れるのは大変なので,まずはロボットの行動ログを取るためだけでも,
面白いかと思います.
更新速度と精度はそこそこかと思われますので,まずは試してみたい方にお勧めです.
ついでに,カルマンフィルタを実装するにあたり一番わかり易い(らしい)本も紹介します.
解りやすいそうなのですが,何度も読み返さないと,なかなか難しいですね.
【関連商品】
 超薄型IMU「9DOF Razor」 |
 IMU ナイン・ディグリーズ・オブ・フリーダム-センサースティック |
 FT232RL搭載小型USB-シリアルアダプタ 3.3V |