なにやら台風3号が近づいてきてるのか来ないのかよくわからない状況でもやっぱ雨はシトシトと降ってて湿気が半端ないです、Faxの紙がくた?んとしてます。
そんなこんなで私的納品ラッシュでさすがにお疲れモードが見え隠れしてきてます。でもこれ終わればちょっとくらいは落ち着けるはず・・・・・・・・ あ、週末はマイクロマウス合宿ですね、運転手ですね 頑張ります。
そしてこんな時に流れてくるBGMが、中島みゆきの「あたいの夏休み」って………
それはさておき、今回のお題にも書きましたが2足ロボを作ってみよう ということでまずボディから進めていきます。
今後の流れとしては
- ボディ作ってみよう
- 足を作ってみよう
- 腕を作ってみよう
- 動かしてみよう
くらいの流れを考えています。ただ4の「動かしてみよう」は幅が広すぎるので分けて進めていこうかと。
事の発端は、うちでHPI JAPAN製のアルミ部品を扱っているのですが、この部品がどう使われるのか?という質問がよくあるのでRIC30を見せながら説明しているのですが、どう組まれているのかはやはりわかりづらいので「んじゃ1台組んで見せたらいいんじゃね?」という流れで始めてます。
最終的にはRIC30が完成しますので、小型ロボを作ってみたいという方の参考になれば幸いです。
ではさっそくボディを組み立てていきます。必要なモノは……
- +ドライバー(細いの(プラスドライバーの0番といいます。)と中くらいの(同じく1番といいます)) 中くらいのはサーボホーンのネジを外すのに使います。
- ソケットドライバー(M2ナット用) 中継ハブやフレーム同士の固定の際に使用します。
- M2x5ネジ(低頭、もしくは超低頭) フレーム同士の固定に多用します。
- M2x6ネジ(低頭、もしくは超低頭) メインハブ、ひざ下フレームの組立に使います。
- M2ナット 至る所で多用します。
- スペーサー(内径2mm、高さ5mm)メインハブ固定用
- サーボモーター 今回は双葉電子工業RS304MD-FFを16個使用します。
- 中継ボックス TTL用TB22PPを6個使います。
- メインハブ G-ROBOTS メインハブ(TTL用)を1個使います。
- メインハブケース メインハブ専用ケース、あると固定がとっても便利
- ケーブル 双葉電子工業CC-E3P3-300を6本、でも長いので自作でも。
- コントローラー RPU-11を1個使います。RPU-10でもOK。
これ以外には付属のネジで間に合います。
では早速製作に入ります。
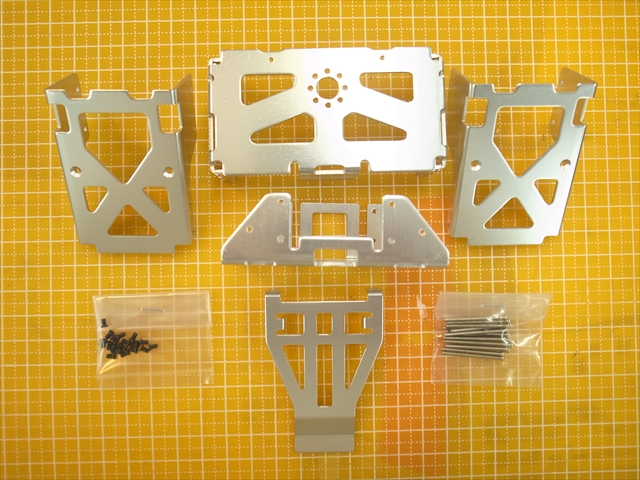
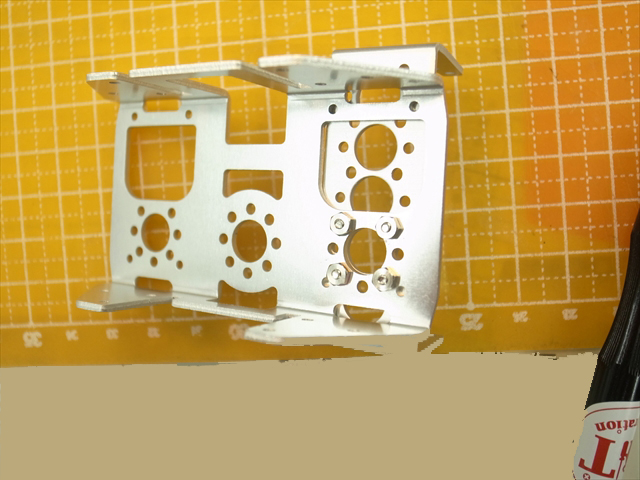
使う部品はG-ROBOTS アルミボディセットです、結構部品があったりします。
下準備としてサーボモーターからホーンを外します。固いですがなるべくこじらずに抜きます。
どうしてもという場合は中心に近いところをマイナスドライバーのようなもので持ち上げます、テコの原理で。

サーボケースを固定している4本のネジを抜いて、付属のM1.7×25のビスを使ってフレームに固定していきます。(2個)
切り欠きにピッタリ収まるので前後は間違えることは無いはずです。裏表は気をつけてください。
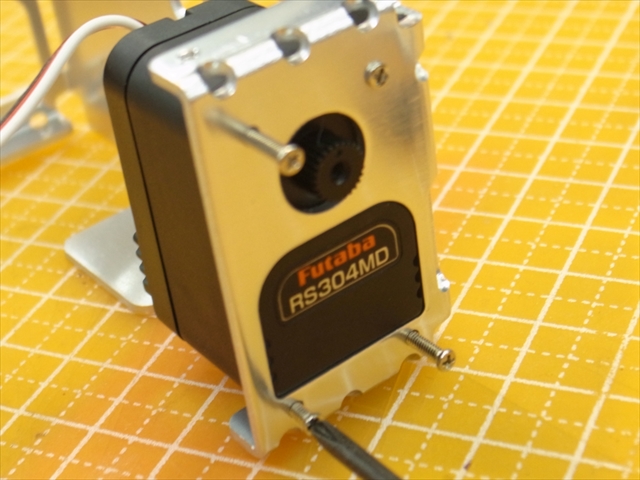
そしてホーンを付け直します。出力軸のポンチ跡とホーンの切り欠きが合うようにつければOK

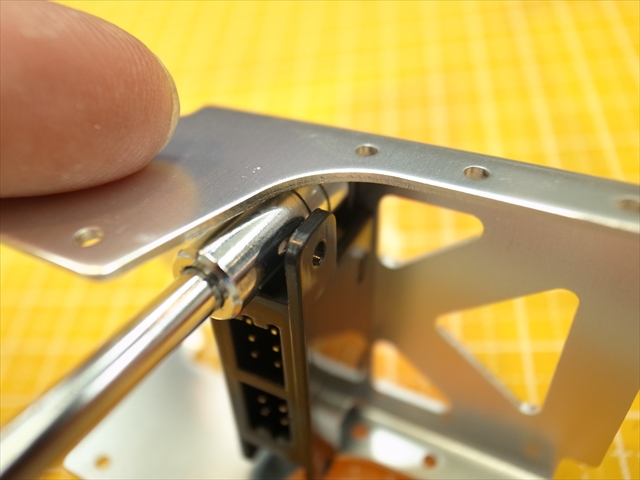
次は中継ボックスを固定します。
裏側にM2ナットを使って締め上げ、ここでソケット活躍。
金属同士の締め付けの箇所にはネジロックを使っておくとネジ外れ等のトラブルが大幅に軽減出来ます。覚悟を決めるなら瞬間接着剤でもいいです(外すのは相当困難になりますよ)。
ネジロックを使い出すときっと経験するのですが 舐めると甘いですっ! わざわざ舐めないように、知らないうちに理解するんで…
2個完成、アルミパーツの裏表を間違えないよう注意です、注意です(実際やらかしました(泣))
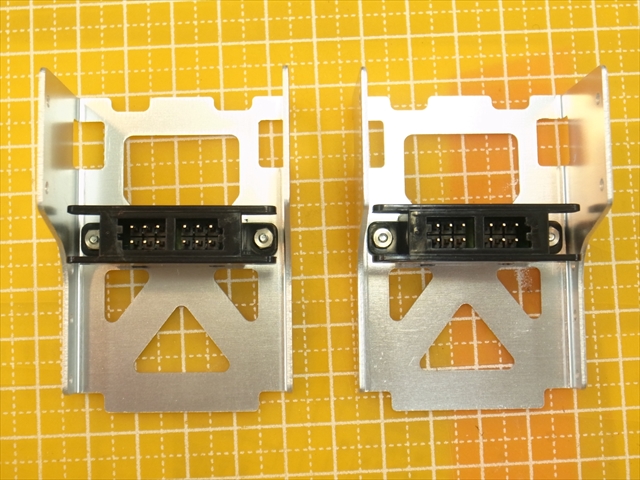
ここの作業は後からでも出来ますが先にやっておくとものすごく楽になるのでやっておきます。
使う部品はG-ROBOTS アルミアーム(ワイドタイプ/ 2個入) 足首にも使うので2セット使います。
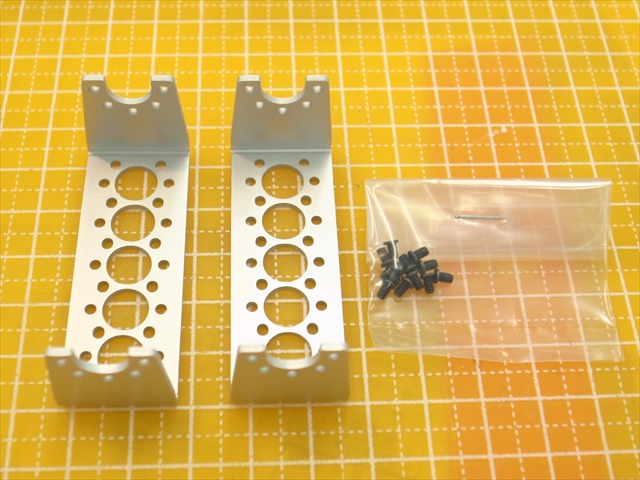
これを固定していきます、だいたいこんなあたりに…
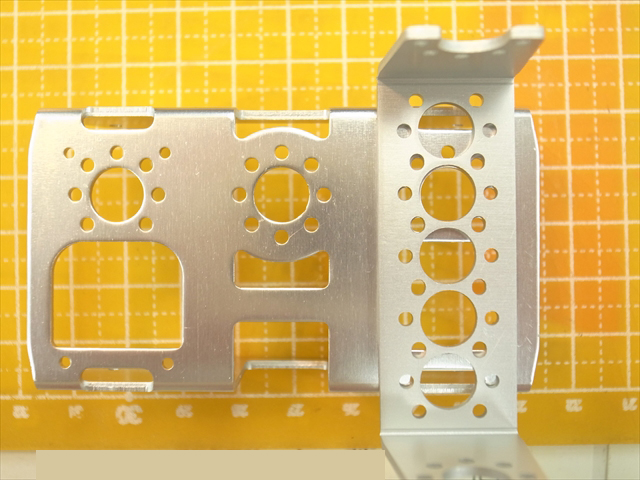
足にヨー軸を追加する場合はここにサーボを追加していきます。(今回は追加していません)

M2x5とM2ナットで固定していきます(2つ)
出来たっ
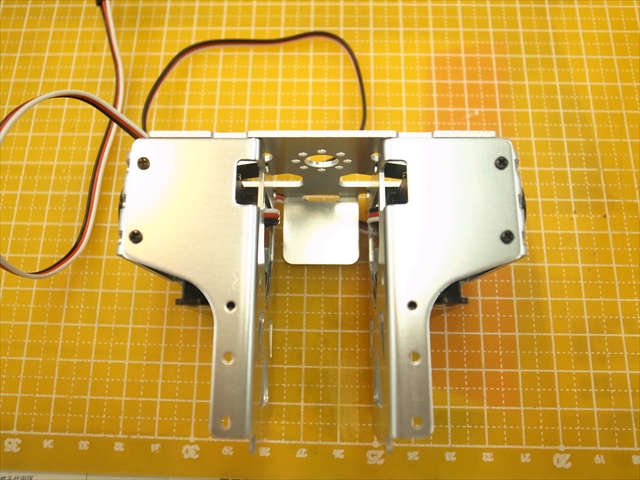
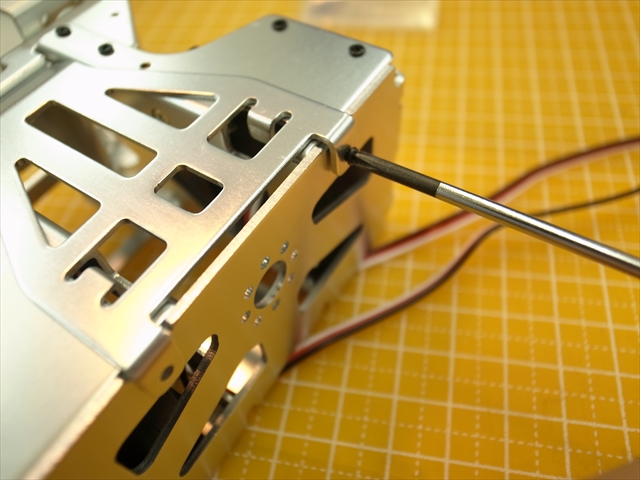
では組み上げていきます。まずはサーボリード線をここにこんな感じで通して
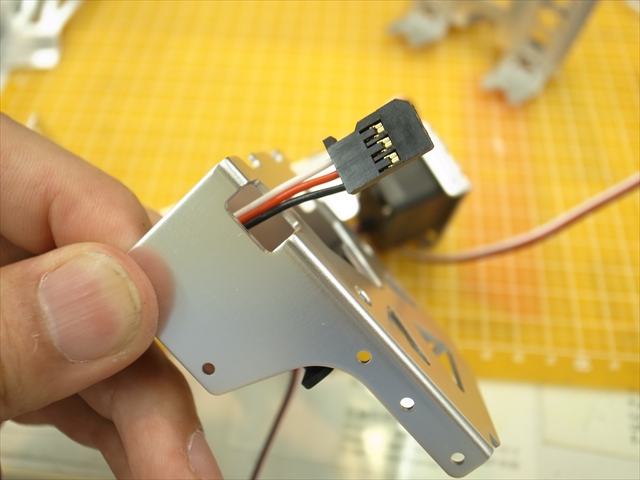
サーボを固定していたフレームに組み付けます、この時に付属のM2x3ネジを使うのですが軽く止めておく程度でいいです、まだ。
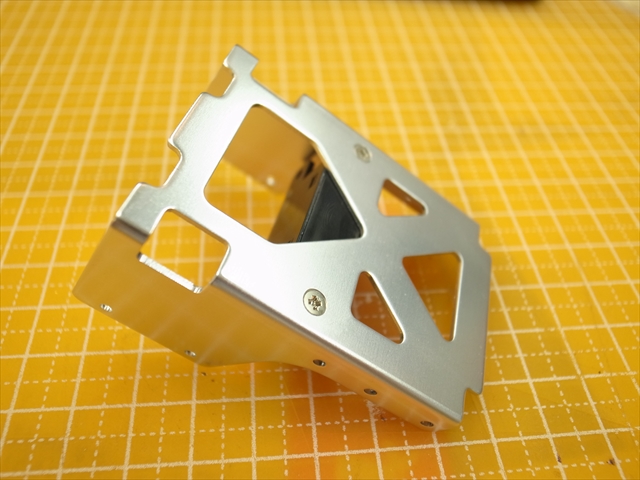
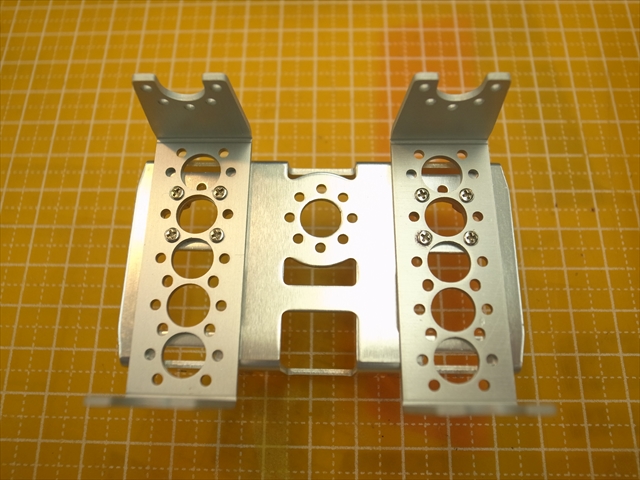
こんなカタチになります。
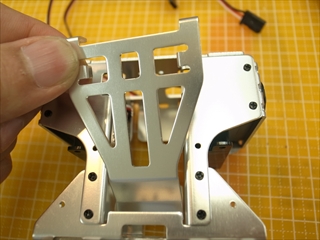
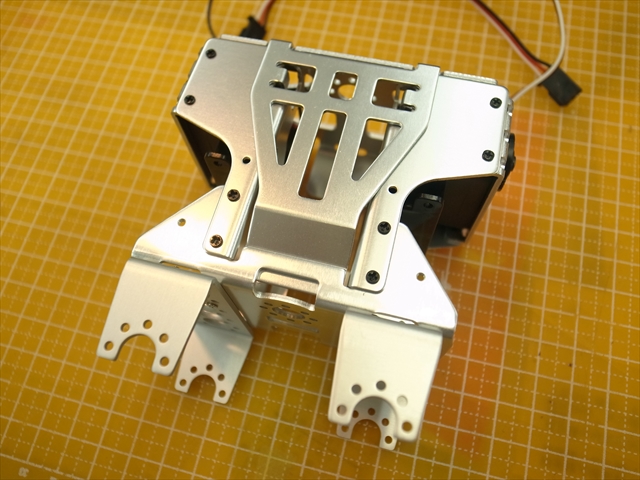
ワイドアームを取り付けたフレームを組み付けます。
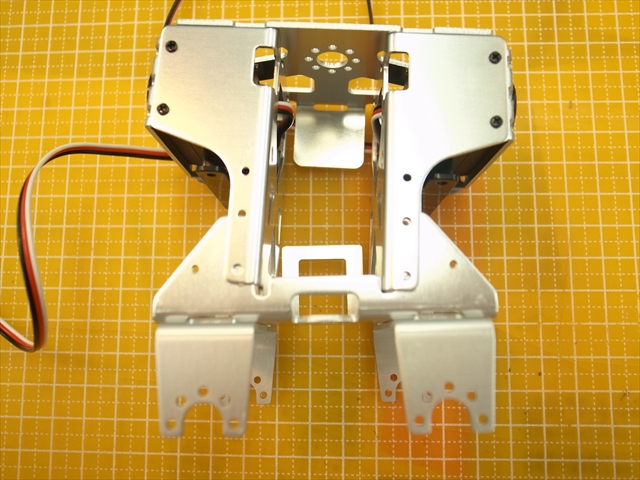
実はこの時に高さが2段階選べます、縦のフレーム下部を切ると低い胴体にも出来るので3段階選べます(切るのは大変ですけど)
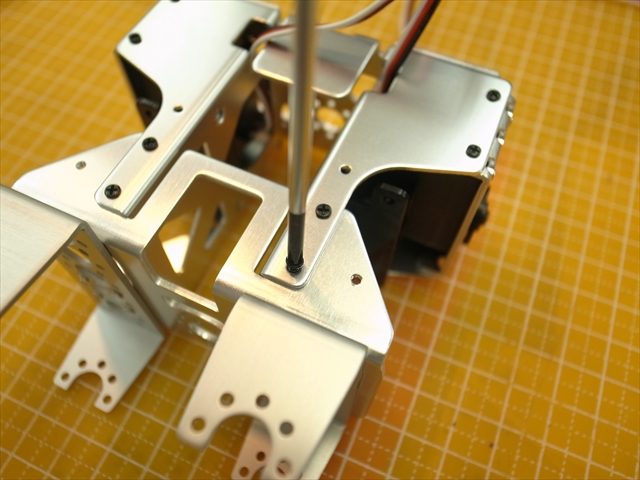
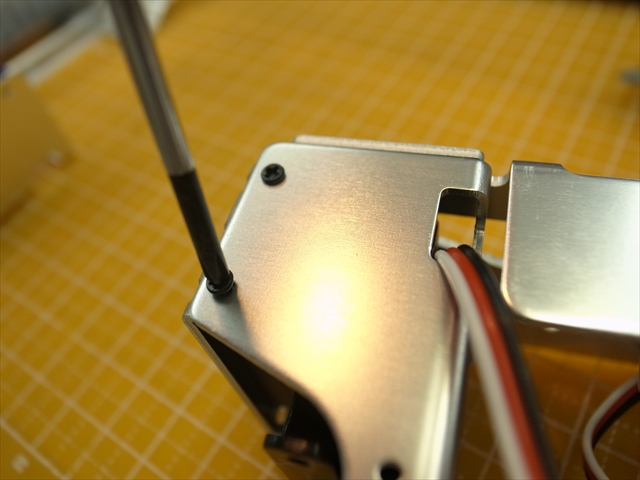
全部のネジが綺麗に入ったら本締めしていきます。対角を意識してネジを締めていきます。
そして胸パーツの組み付け。ここに電池とか入ります。
ROBO-ONEに参加の際の重心規定に合わせるときとかにはここにウェイトを詰めたりして調整しました、懐かしいな……
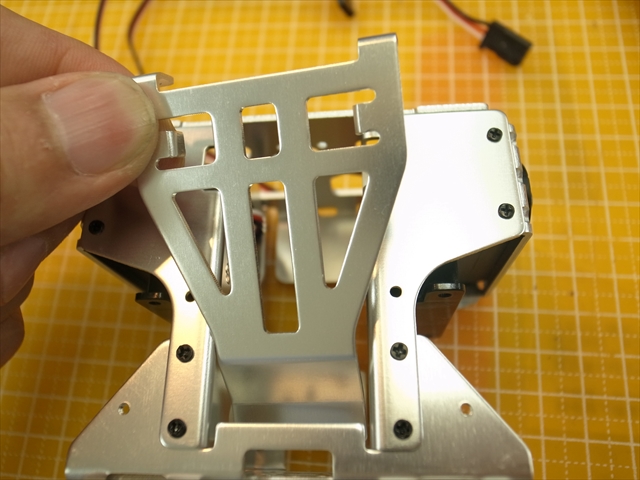
ここの固定にもネジを使いますがネジロックは使いません。電池交換が大変になります。
そして完成っ!!!!
ここまでだいたい1時間くらいです。
さすが市販パーツ、売り物のようにピッタリ収まります(当然だ)。
今回ボディ編ということでここまで組み立てていきましたが、こいつをコアにして独自のロボにするのもアリでしょう。
自作もすごく楽しいですけど、こういった市販パーツを使ってお手軽に仕立てあげ、そこから発展させる楽しみというのもいかがでしょう?
【G-ROBOTSアルミパーツ一覧】
RIC30 |
RS304MD-FF |
 |

