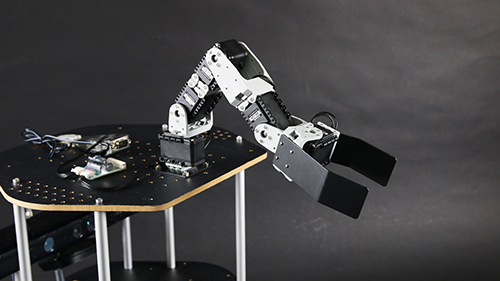
 ROS_CRANE+
ROS_CRANE+ ROSを使用したCRANE+の動かし方 その3
こんにちは!長谷川です。
前回はROSのインストールについて説明しましたが、今回はROSの環境のセットアップとROSのファイルシステムについて説明したいと思います。
今回は、主に英語版Wikiのチュートリアルに従って進みます。日本語版Wik...
ROS_CRANE+  ブログ ROS_CRANE+ ROS_CRANE+ ショップからの重要なお知らせ
ブログ ROS_CRANE+ ROS_CRANE+ ショップからの重要なお知らせ  ブログ
ブログ  ブログ
ブログ  商品紹介
商品紹介  ブログ
ブログ  技術ネタ
技術ネタ