 ROS_CRANE+
ROS_CRANE+ ROSを使用したCRANE+の動かし方 その11(完結)
こんにちは!長谷川です。
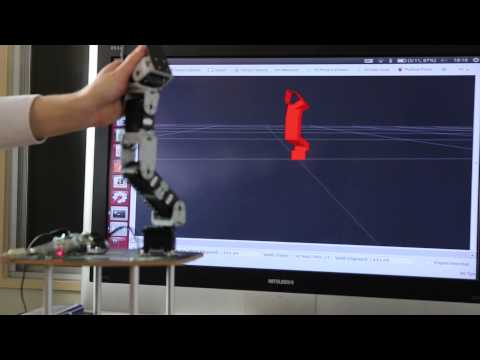
前回はCRANE+の状態をモデルに反映させる方法について説明しましたが、今回は、CRANE+の状態をrviz上でモニタリングしつつ、CRANE+を自動で動かす方法について説明したいと思います。
使用するプログラム
...
ROS_CRANE+ ROS_CRANE+  ROS_CRANE+ ROS_CRANE+ ROS_CRANE+ ROS_CRANE+ ROS_CRANE+ ROS_CRANE+ ROS_CRANE+ ROS_CRANE+
ROS_CRANE+ ROS_CRANE+ ROS_CRANE+ ROS_CRANE+ ROS_CRANE+ ROS_CRANE+ ROS_CRANE+ ROS_CRANE+