まず商品の説明の前に、初めましての方も多いと思うので簡単に自己紹介させて頂きます。7月から入社してそれからマイクロマウスのブログは書いていたのですが、今回から商品のブログも始めました立野です。
よろしくお願いします。
アメリカに5年間ぐらい留学をしていて株式会社RTで働き始めましたが、理系でもなく完全に素人ですが初心者の目線からわかりやすく伝えていきたいと思います。
では今回紹介する製品は、「光源追跡マイクロロボット」。
マイコンを使わないでセンサの反射加減で前に進んだり斜めに進んだりしながら動くとてもかわいらしい小さなロボットです。 写真と動画を付けて紹介していきますが、まず最初に使う部品と道具を紹介していきます。
 ? ?
? ? 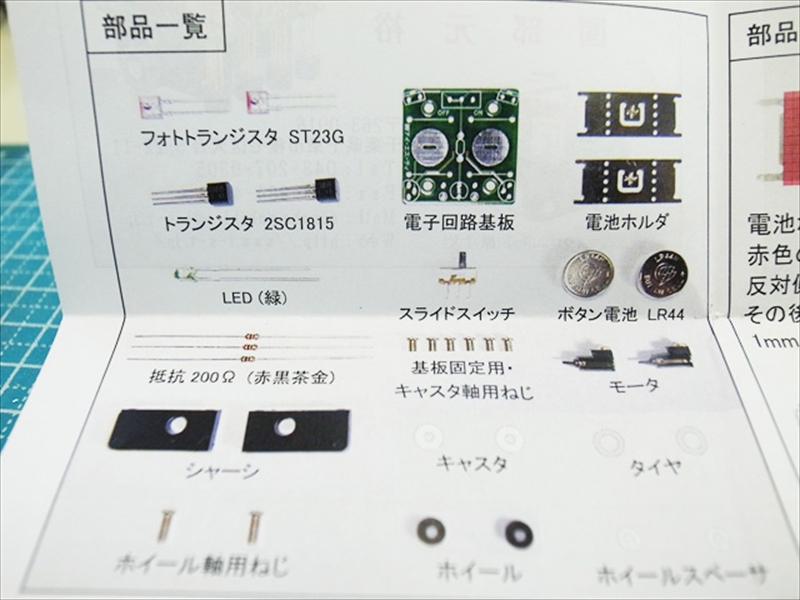
部品は(下記)
・フォトトランジスタ (2つ)
・トランジスタ (2つ)
・抵抗200Ω (3つ)
・シャーシ (2つ)
・ホイール軸用ねじ (2つ)
・電子回路基板
・スライドスイッチ
・基板固定用キャスタ軸用ねじ (6つ)
・キャスタ ・ホイール (2つ)
・電池ホルダ (2つ)
・ボタン電池LR44 (2つ)
・モータ ・タイヤ (2つ)
・ホイールスペーサ ? ?(2つ)
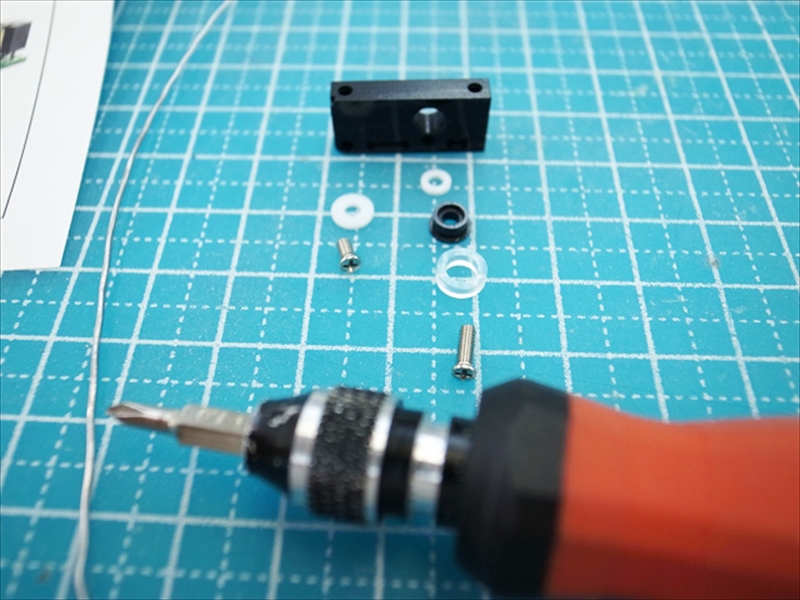
最初に部品の加工から始めます。
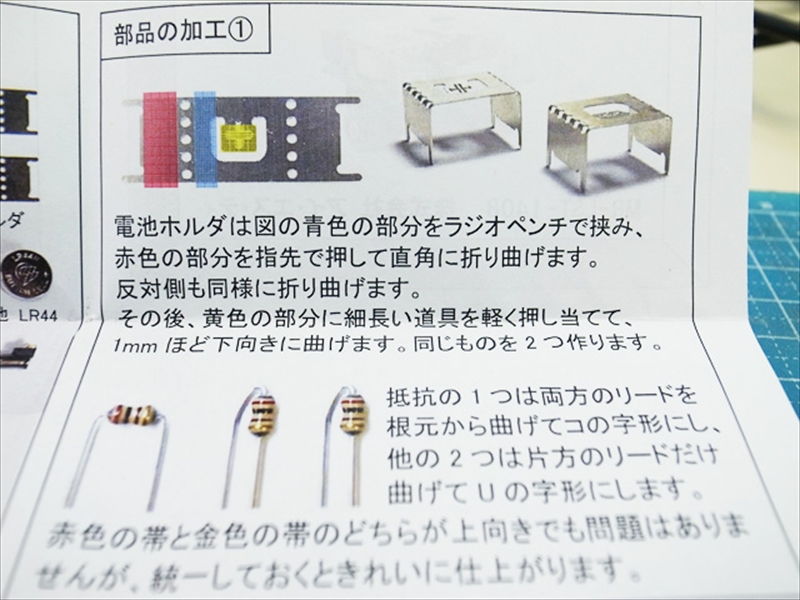
きれいに作り上げるためにできたらラジオペンチを用意できれば便利です。
 ? ?
? ? 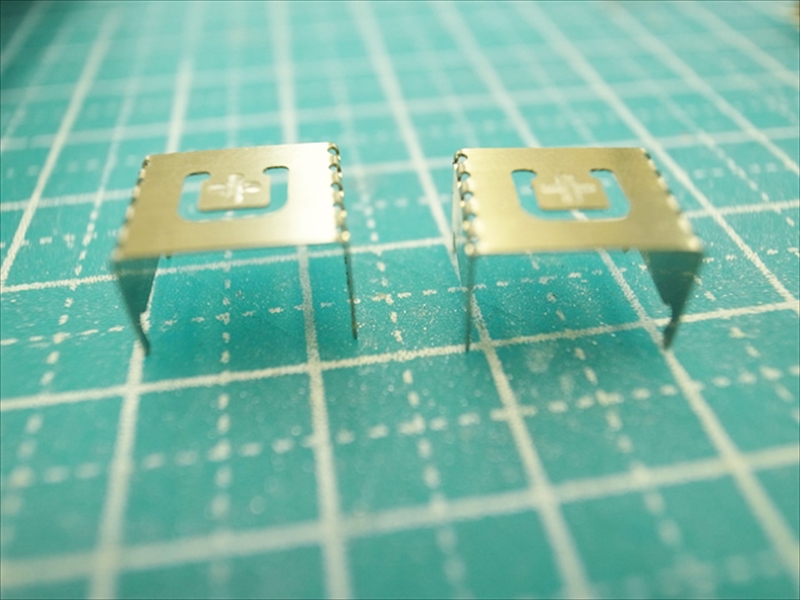
電池ホルダとボタン電池を上手く挟む為にピンセットなどの軽く押さえつけて少し曲げられる物などがあれば便利です。

抵抗の折り曲げは手でも大丈夫だと思います。

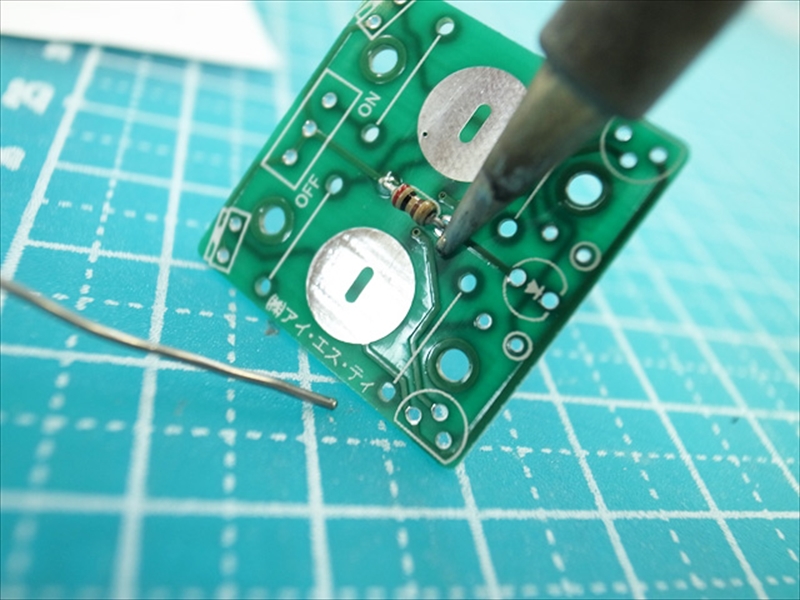
次に折り曲げた抵抗を基板にはんだ付けしていきます。 ? ? ? 真ん中の抵抗だけ基板の表面からはんだ付けします。
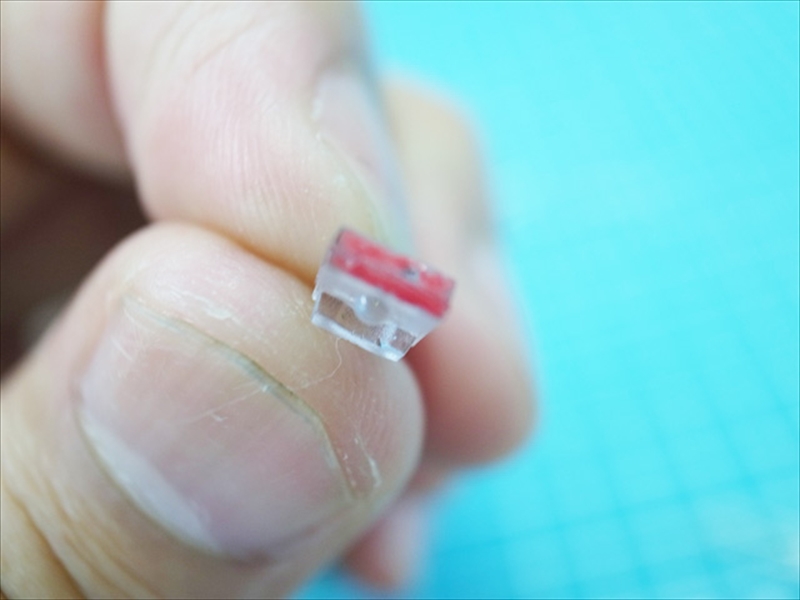
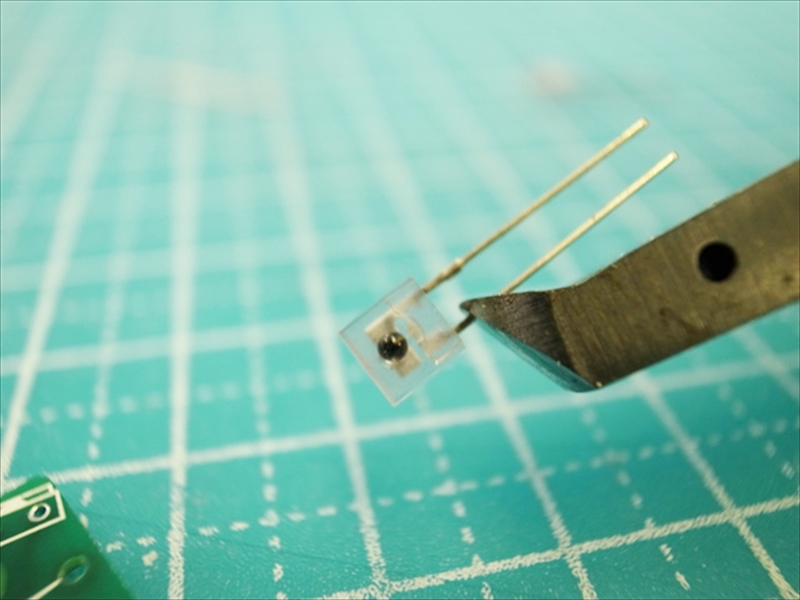
次は、フォトトランジスタをはんだ付けしていきますが最初にニッパーを使ってピンを短くします。 表面が少し赤いので爪などで塗料を落とします。
次はLEDとトランジスタをはんだ付けします。 トランジスタのピンの真ん中は手などで少し曲げて入れてください。LEDは向きがあるので気をつけましょう。
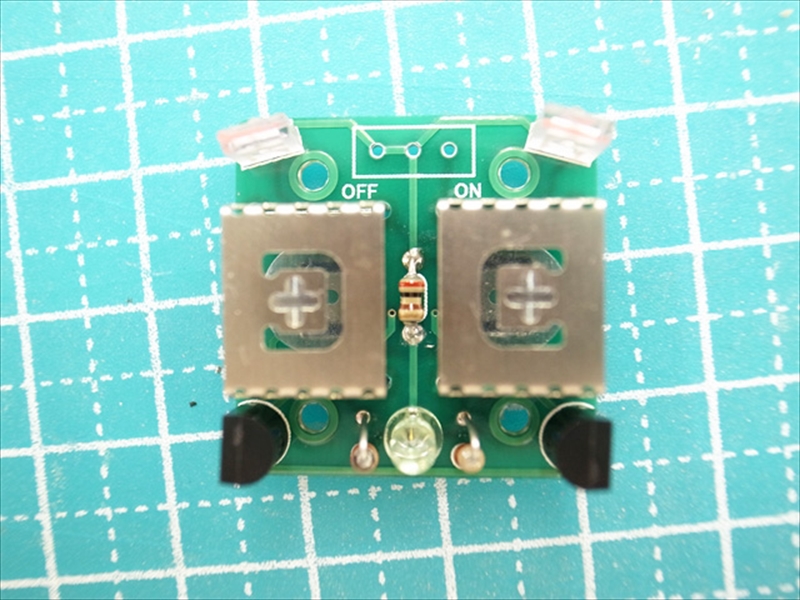
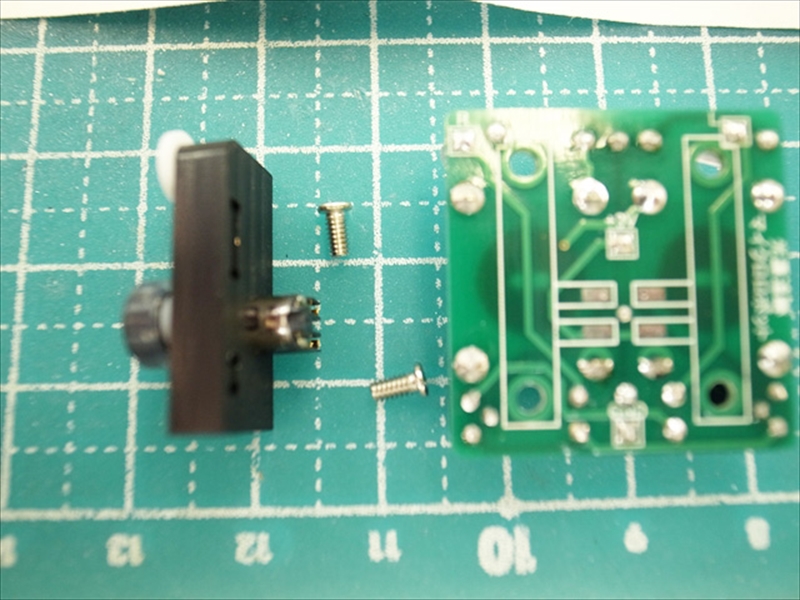
はんだ付け最後は、スイッチをのはんだ付けです。
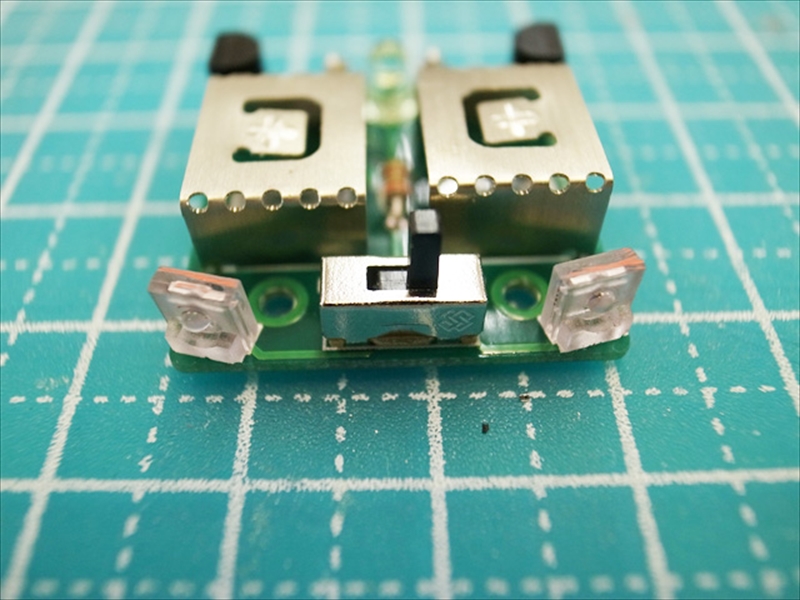
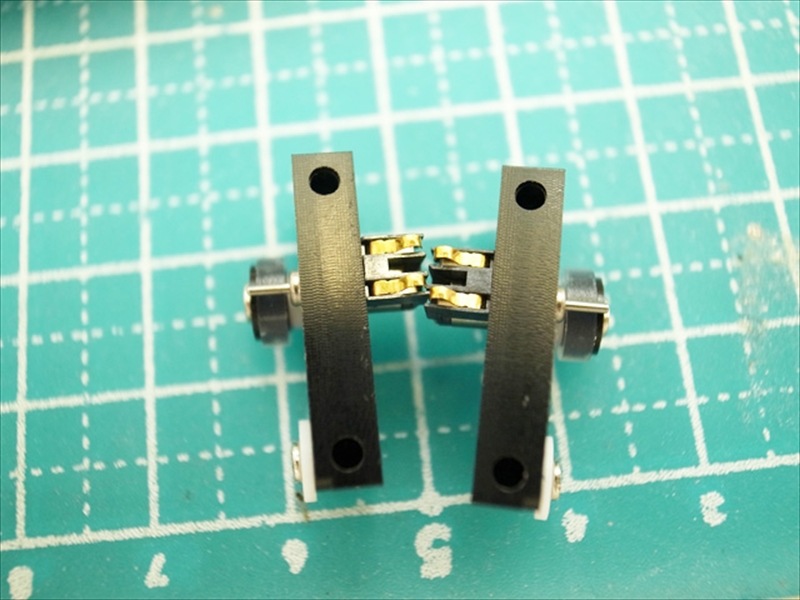
次は、シャーシやタイヤなどを組み立てて基板に取り付けていきます。
このような配列でねじ込んでいきます。(上記) 次は、モータを取り付けて 最後に組み合わせて完成です。
 ?
?  ?
?  ? ?
? ? 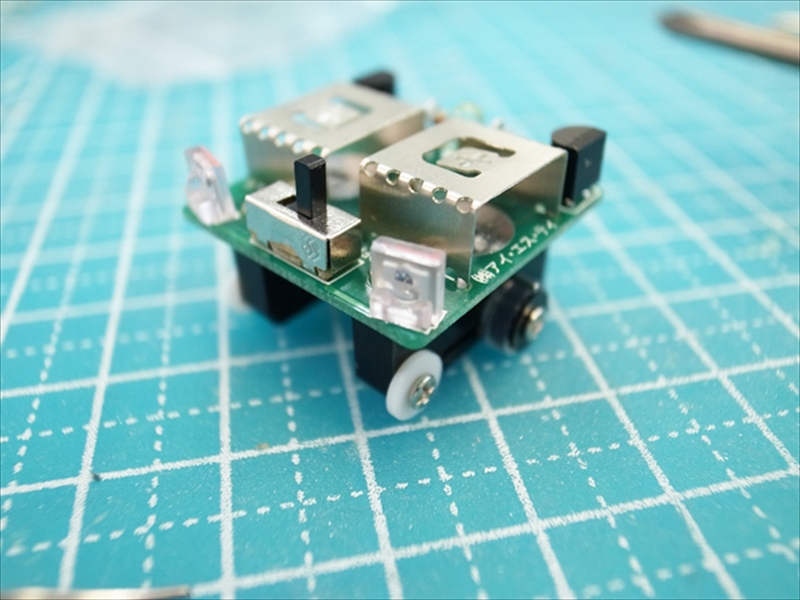
これで完成ですが、スマートフォンの光を当てて動いている様子動画に取ったのでこちらももしよかったら見てください。(下記URL)
 光源追跡マイクロロボット 光源追跡マイクロロボット |
 ライントレースユニット ライントレースユニット |
 Pi:Co Classic2 Pi:Co Classic2 |
