今週末7月7日は「第8回U1K」です。みなさん準備はOKですか?
まだエントリーを迷っている方、いますぐエントリーしてしまいましょう! 迷いも無くなるってもんです。
新競技「パイルダー」の初代王者は初回でしか獲得できないのです、チャレンジしてみてください。
また、8月末までサマーキャンペーンを開催しております。
なんと
?送料全品無料
?キャンペーン特価品(NAO、Turtlebot2)
?双葉電子工業、HPI、ROBOTIS製品10%OFF
?店頭在庫品を特価でご提供※
と盛り沢山な内容になっておりますので、この機会に是非ご活用ください!
なにげに全品送料無料は嬉しいとこかと。 詳細はこちらを御覧ください。
ということで前回からの続きです。
今回からモーション作成に入る… はずでしたが、その前に必要なサーボやRPU-11の初期設定をやっておきましょう。
全部組んだあとで言うのもアレですけど、サーボの設定は絶対組む前にやるほうが楽で安全です。
まず最新の環境を入手してしまいましょう。
HPI JAPANのサポートサイトにG-ROBOTS GR-001統合版CD-ROMが公開されていますのでダウンロードして解凍します。
解凍した中身はこんな感じ。
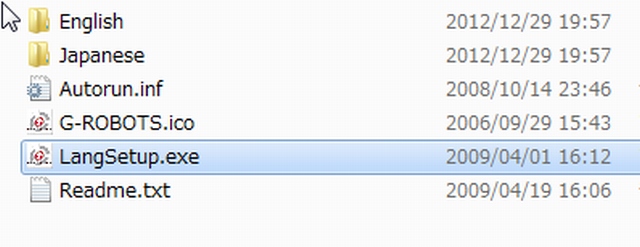
LangSetup.exe をダブルクリックで起動します。
どちらでもいいですがここは日本語を選択してOKをクリック。

Extrasを選んで

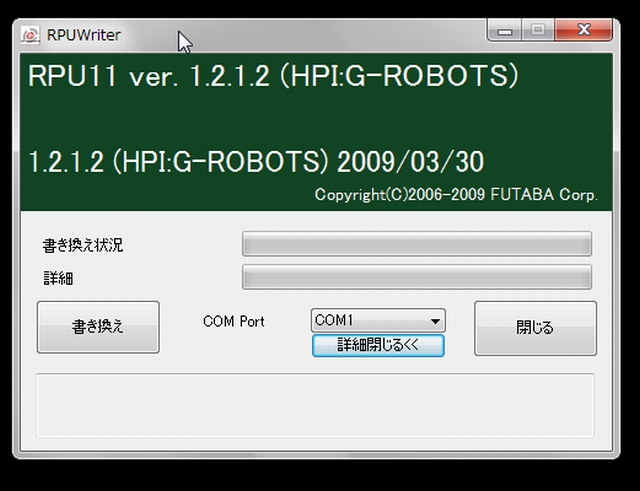
G-ROBOTS用RPU-11(ver.1.2.1.2)書き換えツールをクリックしてインストールします。
起動するとこんな感じ

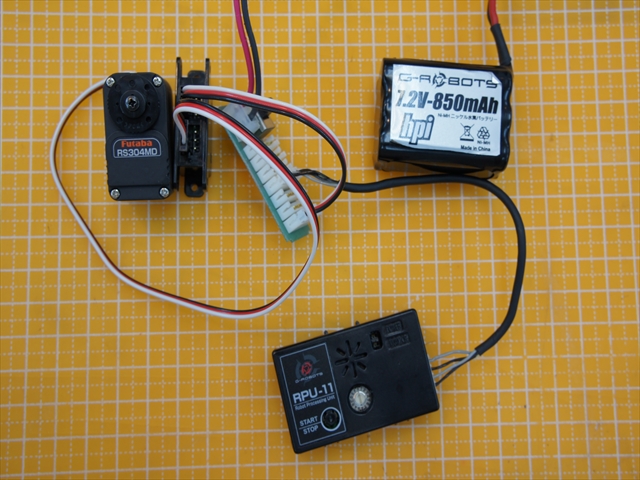
RPU-11、メインハブ、バッテリーを繋いで付属のRS-232Cケーブルで接続します。この時RPUのモードダイヤルが【0(ゼロ)】になっていることを確認しておきます。
最近のPCにはRS-232Cポートが付いてないのが殆どなのでUSB変換ケーブルを使って接続しましょう。
接続したらPC側コントロールパネル→デバイスマネージャー→COMポートでケーブルが何番になってるか確認します。
確認したCOMポート(今回の場合は1番)に設定したら書き換えボタンを押してアップデートします。
この時絶対に電源を切らないでください。状態によりちょっと時間がかかる場合もありますがお茶でも飲みながら待っててください。
書き換えが完了すると「ぷ?、ぷぴぃ?」ってRPUが鳴りますので、この音が聞こえれば完了です。
(アニメ:ロボティクス・ノーツでタネガシマシン3が起動するときにこのRPUサウンドが聞こえてきた時にはちょっと感動した。音撮りのために実機タネガシマシン3をスタジオに持ち込んで起動音や駆動音を撮ったのですよ)
続いてIDの設定作業に移行します。
まず先程書き換えた時の状態に中継ボックスにケーブルを接続し、サーボを追加接続します。
今回書き換えには双葉電子工業株式会社より配布されています「MemoryMapEditor」を使用します。
ロボット用機能部品→ダウンロード→サンプルプログラムにある【?RSC-U485用サンプルプログラム(VB版) ver.1.0】をダウンロードし、解凍します。中にマニュアルがあるのでよく読んでおきましょう。
MemoryMapEditor_VB.exeを起動するとこんな感じ。
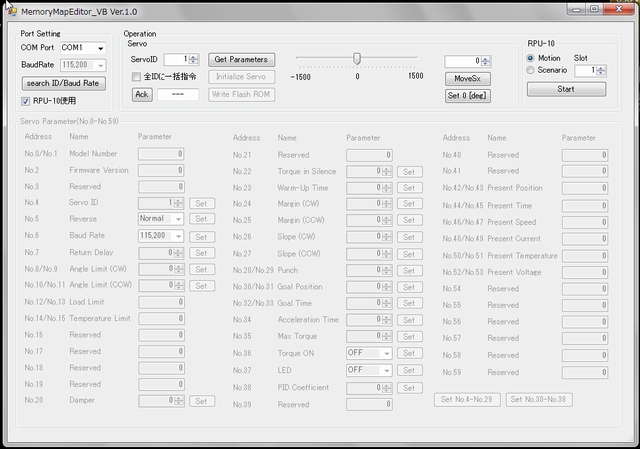
COMポートをRPU書き換え時に調べた番号に合わせ、RPU-10を使用にチェックを入れて
【Search ID/Baud Rate】をクリックすると接続されたサーボのIDを調べに行きます。
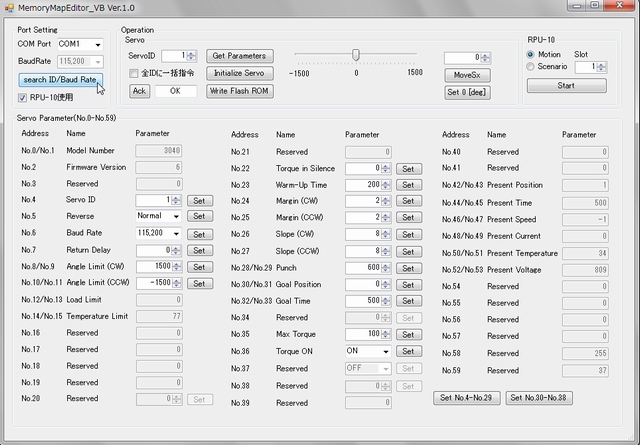
サーチが成功するとサーボの情報が読み込まれ各種パラメータが読み込まれます。
ここからパラメータを色々と設定出来ますけど今回の目的はサーボIDの変更なので触るのはここだけにします、誘惑には負けないで。
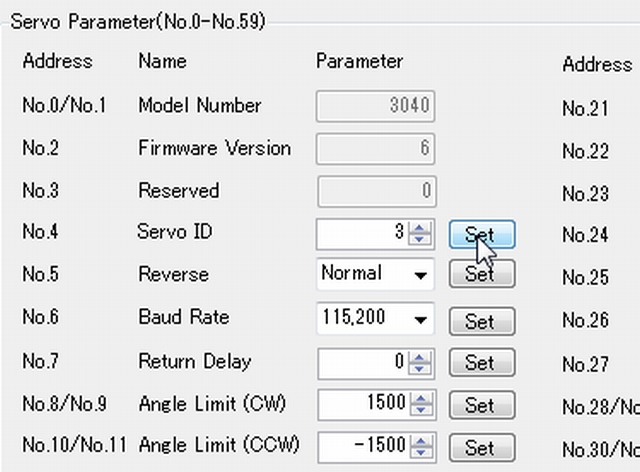
項目No.4にServo IDという項目があるのでここを書き換えたいID番号にして【Set】を押します(今回はID3)。
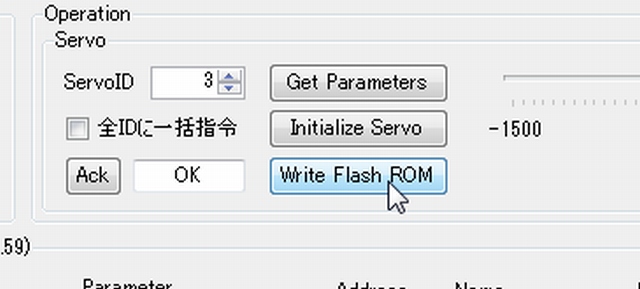
押したら【Write Flash ROM】を押してサーボに書き込みます。
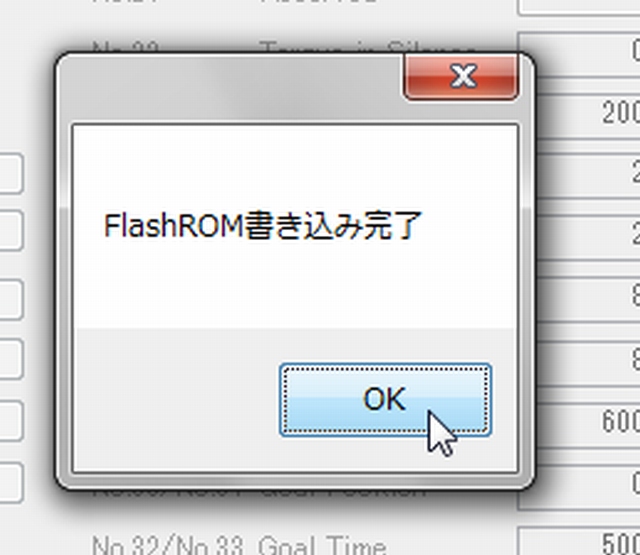
成功すると「FlashROM書き込み完了」と表示されますので【OK】を押します。
ちゃんと書き込まれているか確認してみましょう。
メインハブのスイッチで電源を切り、またONにしてRPUを再起動し、【Search ID/Baud Rate】をクリックしてみて項目No.4のServo IDが先程書き換えた3になっていればOKです。
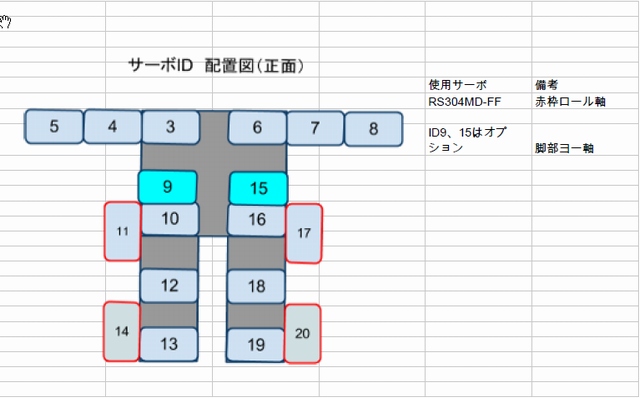
なぜIDに3を書き込んだかというと…

このような配置になっているので3から書き込んだ次第です。
この配置、実はGR-001と同じ配列になっています。腰ピッチ軸(ID:1)、頭部ヨー軸(ID:2)が無いだけです。
あ、標準RIC30には足ヨー軸(ID:9,15)も無いですね。
残りはたった15個、頑張って書き換えてください、1個ずつ…
みなさんはこんなミスせず、組む前にID書き換えやっておきましょう。
 G-ROBOTS RPU-11 |
 RIC30 |
 G-ROBOTS GR-001 (RS303MR・ RS304MDサーボ仕様) |