こんにちは。
暑くなったり涼しくなったり、雨が降ったり直射日光が厳しくなったり。
ころころと変わる気候にみなさんお体お疲れではないですか。
私はけっこうやられてます…w
夏は天気が気分屋なので苦手です。
冬の、あのただただストイックに寒さに立ち向かうあの感じがすきw
こたつやストーブ、ときどきの陽光に「だる?ん」とできる瞬間の至福!!w
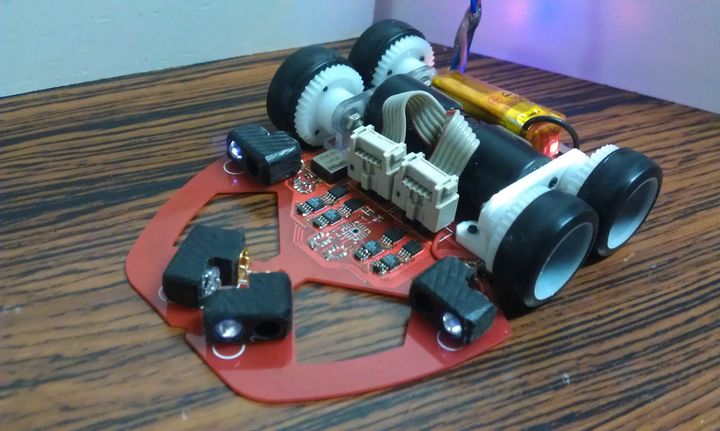
さて、本日金曜日のブログも、引き続き「ちょろ丸」をいじります^^
はんだづけも終わり(最近ある方のご好意でマイはんだごてをGETしました!!!)、
機体も組み立て終わったので、本日から実際にプログラムを触って動かしてみたいと思います!
まずは開発環境のセットアップから。
ちょろ丸付属のCD-ROMに動作確認済みのGCC Developer Lite ver.6.0.14が入っているので、これをダブルクリックして、説明書の指示に従って行います。
本日はわからないことがあるといつも頼りにするのり先生が近くにいないので、ひとりでやっていますが、
説明書を読んだらちゃんとできました♪
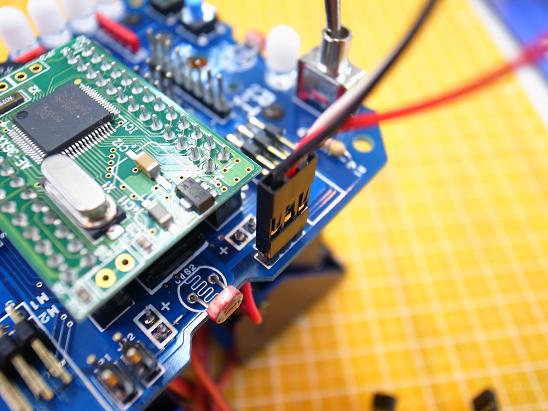
お次は、ケーブルの用意です。
ちょろ丸では、ケーブルをこんなところにつなげます。

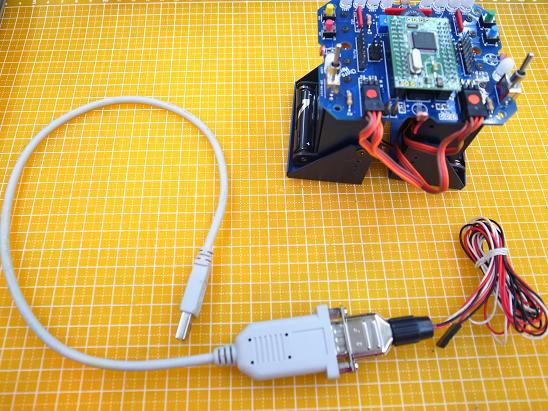
私のPCには付属のケーブルを接続できる9ピンの接続ポートが見つからなかったので、
USBシリアル変換ケーブルを用意しました。
次に、ちょろ丸のサンプルプログラムを先ほどセットアップしたGDLで開きます。
プログラム自体はLEDを点灯させるだけなので、非常にシンプルです。
これをビルドしてライターで書き込み、正常に動作するか確認します。
はじめはポートやボーレートの設定がちょっとむずかしいですね。
説明書に数値等書いてありますので、参考にしてください。

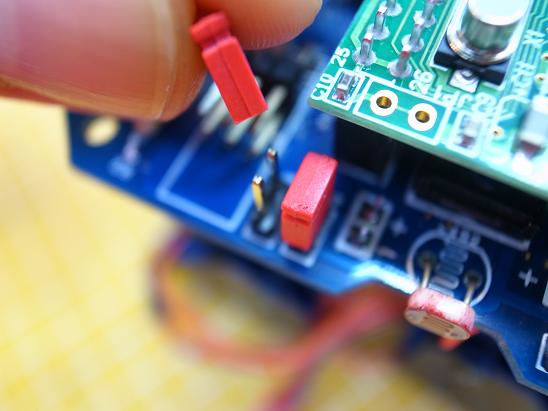
接続がうまくいったら、書き込みます。
ちょろ丸側も、ソケットを取り付けて「書き込みモード」にしてください。
ずんずんずんずん…
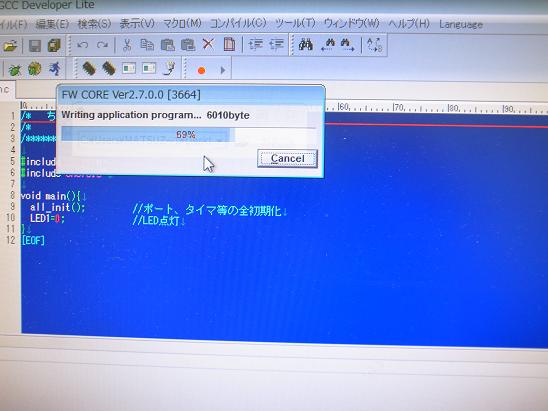
やりました!
LED1が点灯すれば成功です!!
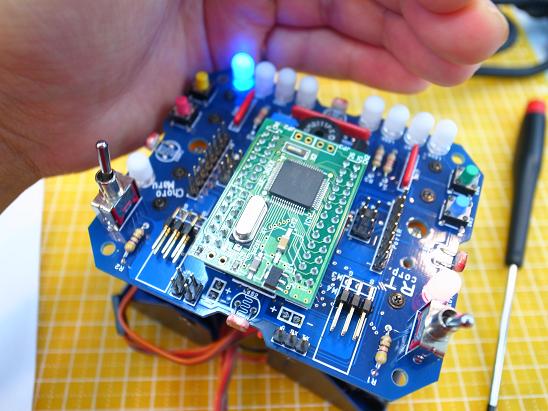
このサンプルプログラムをいろいろいじります♪
と、いうところで時間切れになってしまいました…
なぜ時間がかかったかと言うと、、、
ハンダ付けのし忘れが発見されたからですw
早速マイハンダコテを使えてうれしい♪♪
今回で、プログラムを正常に書き込めるかどうかのテストは終了です。
「二足歩行ロボットを作った!」と言えるようになるべく、早くモータを動かすプログラミングがやりたいなあ♪
 ちょろ丸(半額セール中!) |
 はんだこてセット |
 プレミアムツールセットB |