
ドーモ Seijiです。
第37回全日本マイクロマウス大会シリーズはこれまでマイクロマウスについて書いてきてますので、今回はロボトレースを紹介していきます。
ロボトレース競技は、ロボットに定められた周回コースを走行させ、自律操縦の巧みさとスピードとを競う競技である。ここに出場するロボットをロボトレーサと呼ぶ。
1.ロボトレーサに関する規定
1-1 ロボトレーサは自立型でなければならない。スタートの操作を除き、有線、無線を問わず外部からの一切の操作を行ってはならない。
1-2 ロボトレーサは、競技中に操作者により、ハードウェアおよびソフトウェアの追加、取り外し、交換、変更を受けてはならない。ただし、軽微な修理・調整は許される。
1-3 ロボトレーサの大きさは全長25cm、全幅25cm、全高20cm 以内でなければならない。
1-4 ロボトレーサは、接地力を増すための吸引機構を装備してはならない。
2. コースに関する規定
2-1 コースの走行面は黒色とし、コースは、幅1.9cm の白色のラインで示された周回コースである。ラインの全長は60m以下とする。
2-2 ラインは、直線と円弧の組合せにより構成される。ラインは交差することがある。
2-3 ラインを構成する円弧の曲率半径は、10cm以上とする。また、曲率変化点間の距離は10cm以上とする。
2-4 ラインが交差するとき、交差の角度は90度±5度とする。ラインが交差する点の前後25cmは、ラインは直線とする。
2-5 スタートラインおよびゴールラインを周回コースの直線部分に置く。ゴールラインは、スタートラインの後方1mに置く。ラインの進行方向右側のスタートラインとゴールライン上には、それぞれスタートマーカーとゴールマーカーが定められた位置に貼付される。
2-6 スタートラインとゴールラインの間のラインの中心から左右それぞれ20cmの領域をスタート・ゴールエリアと呼ぶ。また、スタートラインとゴールライン上には、それぞれスタートゲートとゴールゲートが置かれる。スタートゲートとゴールゲートの内のりは幅40cm、高さ25cmとする。
2-7 スタートラインとゴールラインの前後25cmのラインは直線とする。
2-8 ラインの曲率が変化する地点には、進行方向左側の定められた位置にコーナーマーカーが貼付される。
2-9 コースの走行面は通常水平とするが、部分的には最大5度の傾斜がある場合があるものとする。
決勝コース外観
 進行方向左側にある白い点がコーナーマーカー。ゴール時はStartとGoalのゲート間で停止しないと失格となります。
進行方向左側にある白い点がコーナーマーカー。ゴール時はStartとGoalのゲート間で停止しないと失格となります。
今回のコースはスタートしてすぐのストレートと交差エリアを超えてから先の直線に見える小さいターンが連続する区間があります。タイムを稼ぐためにストレートは全開で駆け抜け、コーナーではある程度減速して抜けていくのですが、この後半のエリアは小さいながらもコーナーと認識すると減速してしまうため結構なタイムロスになる区間です。決勝上位のロボットはこの区間の減速を最小限に抑えてタイムを削っていました。
こういった状況判断やコース記憶、そして走行アルゴリズムで動きが変わってくるところも醍醐味です。
マイクロマウスとの大きな違いはロボットの高さに規定がある、吸引機構の禁止といったところが大きな規定の違いです。
ロボット自体はマイクロマウスのように壁を見ない(壁が存在しない)ため、コースのラインを読み取るセンサーを搭載しています。
多くの機体は赤外線とフォトトランジスタを使って床面の白と黒の反射の違いを見て、エンコーダーで距離を測りながらコーナーマーカーでコーナーを覚えて、3回の走行を使って最速を狙います。
ですが、今大会参加機体でフォトトランジスタを用いず、ラインCCDでラインを検知して走るロボットが登場しました。
 正面のカメラでラインを検知します。
正面のカメラでラインを検知します。
決勝エキシビジョンで走行しましたが見事に完走。競技が終わっても参加者から質問攻めにあっていたので来年は搭載してくる機体も増えてくるのではないでしょうか。
知能部分で面白かったのがこちらの機体。
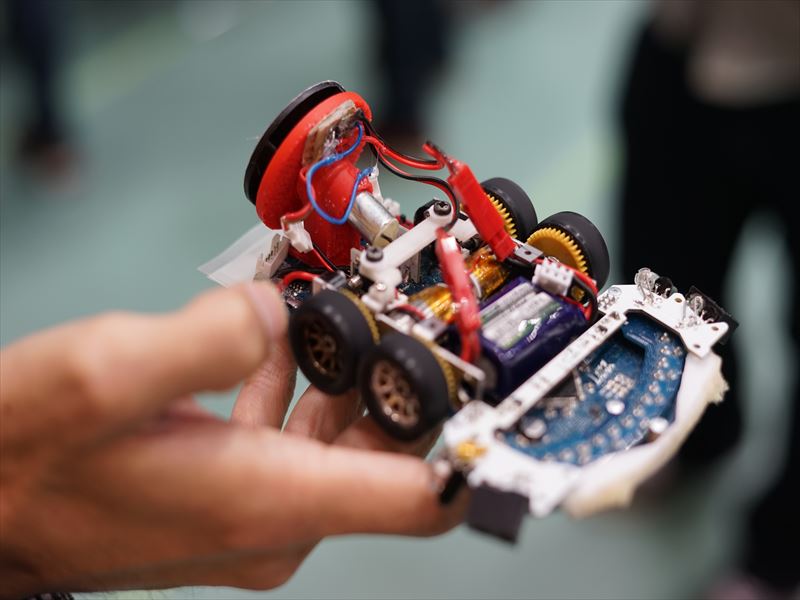 マイクロマウスと共用してるロボットなので壁センサーと吸引機構が搭載されていますが、ロボトレース競技では未使用です。
マイクロマウスと共用してるロボットなので壁センサーと吸引機構が搭載されていますが、ロボトレース競技では未使用です。
この機体はコーナーマーカーを頼りにせず、ライン上を走行時に各種データを記憶し続け、ロボット内で記憶したコースから走行アルゴリズムを生成して走るロボットです。最終的にはコーナーマーカーに頼らず、最速走行時にはラインすら読まずに走れるところまで推し進めるそうです、期待しています。
今大会のトレンドとして「プロペラ」を装備する機体が複数台現れています。
最初のほうで「吸引機構は禁止」と書きましたが、そこを逆手に取ってプロペラで押し付けるっ!というアプローチです。
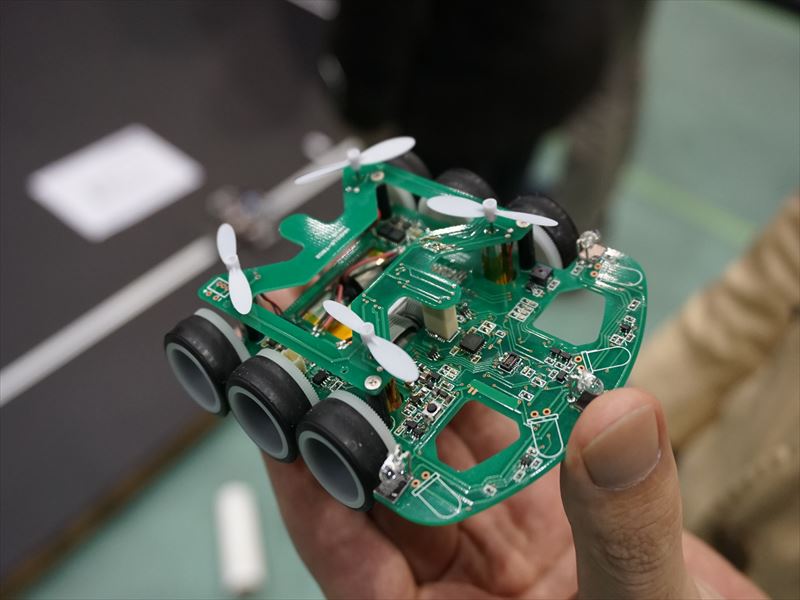 こんな感じのクアッドローターですが飛びません。
こんな感じのクアッドローターですが飛びません。
効果はどうか?と聞いてみたところ「今は微妙だけど可能性はすごく感じる」とのことでしたので、来年はどうなっているのかすごく期待です。
第37回大会の感想ですが フレッシュマンクラスの充実と市販機体での参加、新しいアイデアを導入してくるロボトレース、上位陣の激しいタイムの削り合いのマイクロマウス と、また新しいフェイズに入ってきたのかな と。
新しいものがどんどん出てきても根底にある考え方、機構なんかは定番的なものになっているので、「はじめてみたいっ!」と思ったときにも情報が多く、Pi:Co Classicのような市販機も用意していますのでぜひ挑戦してみてはいかがでしょうか?
38回大会にどれだけ新規挑戦者が現れるのか今から楽しみです。
 クラシックサイズマイクロマウス Pi:Co Classic3 クラシックサイズマイクロマウス Pi:Co Classic3 |
 クラシックサイズマイクロマウス迷路用部材 クラシックサイズマイクロマウス迷路用部材 |
 ハーフサイズマイクロマウス 迷路用部材 ハーフサイズマイクロマウス 迷路用部材 |

