こんにちは、営業部の渋谷です。
アールティの研究開発向けロボットをご利用いただいているお客様に、実際の使用感やロボットを使った研究開発の内容を伺うインタビュー企画の第三弾です。
今回は、筑波大学 システム情報工学研究科 准教授の境野 翔先生にお話を伺いました。
境野先生の研究室では、人間支援ロボットの制御の研究に取り組まれており、アールティのCRANE-X7を6台、Sciurus17を2台、研究の一部にご活用いただいています。
モーションコントロール研究室 HP
今年3月に開催された2022国際ロボット展では、同研究室のブースにて「バイラテラル制御(※1)とディープラーニングを用いたロボットによる高速汎用物体操作」の研究成果として、CRANE-X7を使った3つのデモが展示されていました。
本インタビューでは上記デモの開発について掘り下げて、詳しく伺っていきます!
ロボットの遠隔操作の手法のひとつ。操作者が操る「リーダー」のアームの動きと同じ動きを「フォロワー」のアームで再現することにより、遠隔作業を行うことができる。リーダーから一方的に動作指令を送るだけでなく、フォロワーが感じた力感覚をリーダー装置を経由して操縦者にフィードバックすることができるため、現場で実際に作業しているような感覚を得ることができる。
参考:日本機械学会 機械工学辞典
筑波大学モーションコントロール研究室YouTubeより
2022国際ロボット展で展示したデモについて
よろしくお願いします。

「物体把持&運搬」固さの違う食材を掴んで隣のトレイに置く
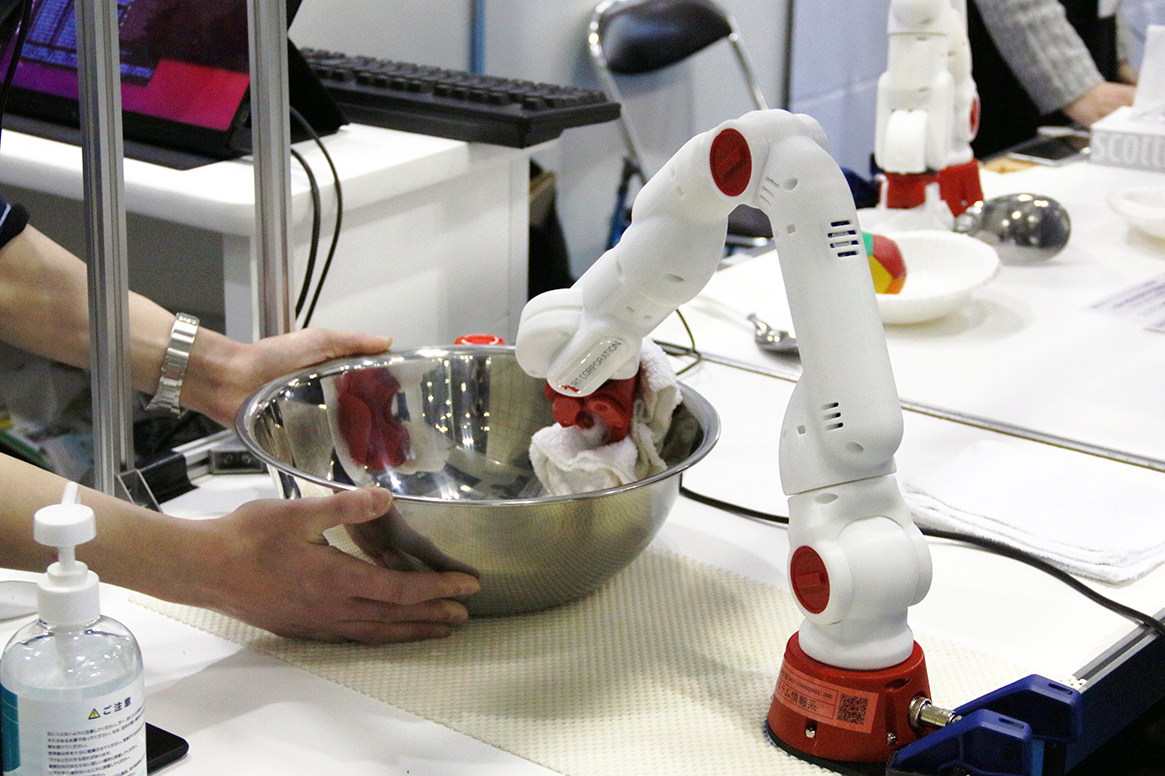
「ボウルの拭き掃除」深さや曲面が違うボウルを拭く

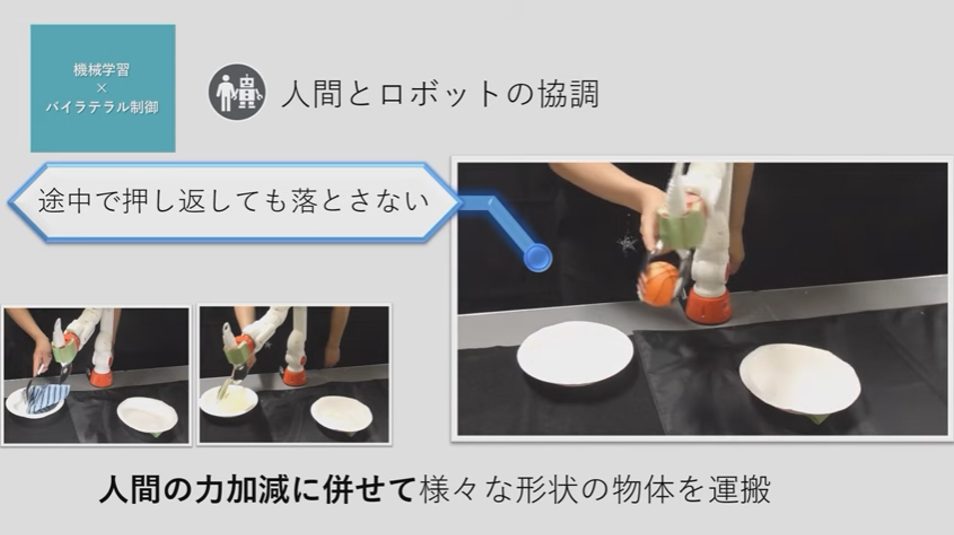
「人間とロボットの協調」 スプーンを持った人間とロボットが一緒にボールを持ち、共同作業で別のお皿に運ぶ
個人的に好きなのは、スプーンを持った人間とアームロボットが一緒に小さなボールを持つデモです。豆腐を掴んだりボウルを拭いたりするデモは、従来のロボットでも頑張って作りこんで、if文をいっぱい書いてプログラミングすれば出来るんです。
でも、人間と一緒にボールを持つデモを作れる人は世界で他にいないはずです。
関東ロボット練習会YouTtubeより
そうですね。覚えさせているのもあります。あと、人間は動きが早いから、ロボットも早く動けないといけないんですよね。うちの研究室みたいに応答速度の早さを出せる所じゃないとあのデモはできなくて。
うちより賢くロボットを動かせるところは世界中にたくさんあります。でも、ああいう対応力をうちの研究室並みの早さで動かすのは他の人は出来ないです。早さと適応能力を両立出来ているのがあのデモで、あれがお気に入りです。
ロボットを動かすまでに時間がかかったけど、動くようになってからは1か月くらいです。
そうですね。普通は年単位でかけるものだと思うので。
人間のスキルをロボットがコピーしているので、簡単に言うと、遠隔操作をしている人間がだんだん上手くなっていますね。
はい、新入生は上手く動かせません。それがメリットでもあり、デメリットでもあります。
開発していく内に人間側のスプーンの持ち方が上手くなる(YouTubeよりキャプチャ)
人が生まれてから学生としてロボットを操作するまでの間に、何百万回も事前にどこかで練習をしていて、その動きをロボットに覚えさせているので、そこまで数えると試行回数は莫大な数になります。
人間の動きを覚えるということは、場合によっては生物の進化まで込みでロボットは学習することになるわけですが、そこをロボットやAIに強化学習(繰り返し試行錯誤で学習)させるということを、現在の人間が意図的に作るというのは難しいんです。
それは諦めて「人間」に強化学習をさせました。人間は何故か上手く動けちゃうんですよ。
そこの、どうやるか知らないけれど自然と上手に出来る動きは全部人間にやらせて、出来上がった動きをロボットがコピーするだけだから楽なんです。面倒くさいところは全部スキップして人間にお任せする、ということです。
そうですね。あとは我々は理学系ではなく工学系なので、いかに早く社会に還元するかというのがやはり大事で、そこは重視していますね。
さっきの話と近いですが、多自由度ロボットは、どのロボットも制御性能がイマイチなんです。だから、どういうタスクだったら人間がロボットに教えやすいかを考えています。
遠くにあるものを掴もうと手を伸ばすと、ロボットは振動しやすいんです。そうならないよう、そもそも人間がやってもダメな問題設定を外してデモが出来る形に持っていくところを工夫しました。
CRANE-X7の活用について

多分ネットで調べたと思います。
CRANE-X7の存在自体は知っていましたが、おもちゃみたいなものがあると思って当時は買うつもりはなかったです。
CRANE-X7を買う前に、他社のアームロボットをたくさん買ったんです。
ハードウェアの性能として正直言うと、CRANE-X7より良いものなんです。ただ、ハンドは位置制御しかできないんですよ。ハンド以外は力制御が出来るから「いいかな」と思って買ったのですが、結局それが出来ないせいでデモの見た目が悪くなりました。
あと、力制御が出来る為のサンプルソースが中々出てこなくて、もらうだけで1年くらいかかったので、他のアームロボットがないのか探し始めました。
協働ロボットを探したら、なかなか力制御ができるロボットがなくて…あるかと思うと、いわゆる産業マニピュレータみたいなごついのしかなくて。
いい塩梅のものがなくてすごく困って、自作しなければいけないかなと思っていた時に、CRANE-X7がハンドを含めて力制御が出来ると見つけて買おうと思いました。
サポートが早いということに尽きます。
ロボットを触ったことがある人なら分かると思うんですけど、壊れて修理が必要となったら一番早くて3ヵ月。半年、1年待ちなんてよくあって。しかも今は半導体不足とかで本当に遅いんです。
アールティさんは、壊れても直すまでに2〜3週間くらいですし、サーボモータが汎用的なROBOTIS社のDynamixelなので、壊れてもネット発注して2?3日後には届いて直せるので楽です。
ここまでの修理スピードだったら、他のメーカーでもやれないことはないと思うんですけど、以前新しいハンドを作りたくてアールティさんに開発をお願いしたら、2ヵ月くらいで届きました。そんなに早いところは国内を探してもどこにもないと思います。世界中探してもほぼないと思いますよ。
大学の時間感覚で付き合ってくれるのが一番ですね。こういう機械学習系はガンガン実験を回すことが大事なので、早く回すことに付き合ってくれることが一番大事かと。
性能ではないですが、大きさのチョイスはいいところをついているかもしれないです。
さっき言った他メーカーのアームロボットはもっと大きいんですよ。本当に自分の腕かそれ以上の長さがあるので。
人間並みのことをやろうとしたら確かにそのくらいの長さが必要なんですけど、それを動かすレベルのことをやるのは恐らく遠い未来なので。最初からそんな大きいものがあっても…と。
そこから考えると、「サイズ」は仕様としては誰も見ないところだけれど、いざ使ってみると大きさが丁度いい、と感じました。使用者に寄り添うイメージがあるサイズ感です。
研究って基本的に失敗の連続なんですよ。暴走したロボットがガガガーッと動いたりして、比喩じゃなく本当に人が死んでしまうリスクがあるんです。
例えば、私が学生の頃にやった跳躍ロボットは飛ぶから結構力が出るんですけど、暴走した時に壁を蹴って穴を開けるんです。そこにもし人がいたら絶対に危険ですよね。
なので、JISでは「人がロボットに近づいちゃいけない」という仕様を作っているわけです。
小型で安全なロボットを使えるということは、バイラテラル制御を行う上でとても大事なことです。
そういうことを無理にやっているので、ちゃんと安全に配慮しないと危ないんです。
CRANE-X7は暴走しても手で止められるから、ぶつかっても「痛い」で済むんです。こういうのは論文には全然書けない部分だけれど、研究をやるならそのくらいじゃないと困りますね。
今後の展望について
工場内でのピック&プレースというレベルの話は3年以内のタスクだと思います。ただ、その工場向けに作ったロボットを農場でも使えるかと言ったら、防水・防塵の話でハードウェアは止まるんです。
やらないといけないことは色々とあって1人では出来ないので、どういう風にやったら一番早く仲間が増えていくだろうかと今、考えています。
数十年後の話では、私が筑波大学の面接で「リタイヤするまでに肉体労働をなくします」と宣言したので、全部は無理でも肉体労働の1割くらいはなくしたいな、と。
正直、遠隔操作はどうでもいいっちゃどうでもいいんです。ただ、単純な制御の仕組みとして、今までのものとは全然違うものをやってる気がするから、「ここを掘ったらなんかありそうだな」という予感がして、ずっと続けてきたというのが正しいですね。
私の博士論文も、「バイラテラル制御でやっている制御の枠組みは、実は全ての人間がやっているような制御の枠組みと全く等価のことであって、いい変換を見つけれられたら、そこが結び付けられる」ということを書いたんです。でも、「じゃあ、その変換を誰が見つけるんですか?」と聞かれても当時は「誰かがその変換を見つけて下さい、僕には分かりません」と。
それが今は機械学習で、データを使ってある意味では半自動的に求められるようになったので「これならいけるじゃん」と始めたのが今のテーマなんですよね。
下世話な話ですけど、潰れないことです。
昔、サポートしてくれているメーカーが潰れることが本当にあったので。長く続けてもらえることが一番です。
最後に
「ロボット」というと、鉄腕アトムから脈々と受け継がれてきたロボットアニメの印象も手伝って一般的に「なんでもできる」「強くて賢い」というイメージがあると思います。
しかし、ロボットに縁のなかった私がアールティに入社して知った事実は「ロボットはまだ発展途上」であるということ。
人間のさまざまな動作を、気が遠くなるような膨大な回数でロボットに学習させて自律的に動かすのではなく、人間側が生まれてからそれまでに習得した感覚で行える上手な動作だけをロボットにコピーさせるお話は目から鱗でした。
それがひいては、人間が何気なくやっているようなことができるロボット、例えば「初めて見る・初めて知る形のお皿を難なく拭けるロボット」などの開発に将来的に通じるのだろうと思います。
「肉体労働をなくしていく」という大きな目標をクリアする為の研究に、CRANE-X7が使われていることを嬉しく思います。
境野先生、この度はお忙しい中インタビューを受けていただき、どうもありがとうございました。
境野 翔先生 プロフィール
筑波大学 システム情報工学研究科
准教授
研究分野:知能機械学・機械システム、制御・システム工学、電力工学・電力変換・電気機器
研究内容詳細(筑波大学HP 研究者総覧)
モーションコントロール研究室 HP

