ドーモ Seijiです
チロルチョコロボット大会お疲れさまでした。
賞品のチロルチョコはみなさん職場で配られたりして好評とのことよかったです。
今回はチロルチョコロボット大会12の競技を振り返ります、今回は「2m斜面ダッシュ」です。
競技のルールとしては
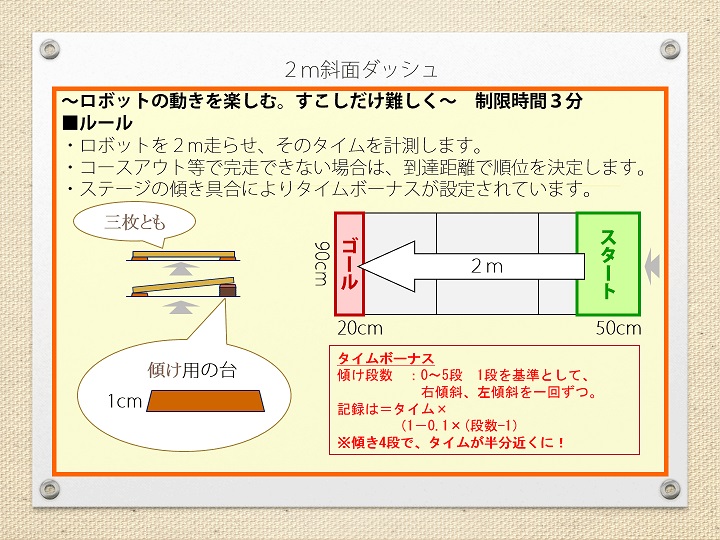
となっており、傾斜の段数によりボーナスが入ります。
傾斜がついているため普通に歩行していくと低い方に流されてしまうのでいかに補正しながら進むかでタイムに影響が出てきます。
トップバッターのνチロモンの走行動画です。
いきなり5段持ち上げ(最大)でチャレンジしましたが、やはり斜面に流されて曲がってしまってますが、機転を利かせてバック歩行に切り替えたりしながらロスを少なくする歩行を行うあたりさすがチロルのベテランでした。
特徴的な歩行のぽさ2号、チロルチョコの常連中の常連です。
当初は「このコースで歩けるのか?」と皆が不安になっていたのですが、いざ動き出したら快調に進んでいきます。
この機体が脚部は2軸で、振り子に1軸使い足の出し方と振り子による重心移動で歩行するという今では珍しい機構です。残念ながらこの動画では途中で落下してしまいましたが1回目は4段で完走しています。
この大会の参加ロボの脚構成としてはヨー軸とロール軸を2組で構成するのがスタンダードですが、その中でも「プロの犯行」とみんなが唸った機体がこのチロルコビス。
脚部サーボにKRS-6003Rというハイトルクサーボをおごり、チロル外装ジャストサイズのアルミフレームで剛性も確保した上でしっかり作り込まれたフレームでチロル大会に来るという本気っぷり、動作を見ててもきれいな歩行でした。動画では横移動で進んでいますが、実はスラロームも可能という作りこみ具合でした。
そして最速がこのテルルでした。
「脚部は4軸」というルールに合わせて、ももロール軸x2と足首ロールx2のみ使い、他のサーボは動かさないという構成で見事5段という傾斜をものともせず駆け抜けていきました。旋回は首を振ってその反動で旋回します。
途中ステッカーに乗ってしまい、グリップが変わってしまいロスしていますがそれでも十分に早かったです。
リザルトは下記の通りです。
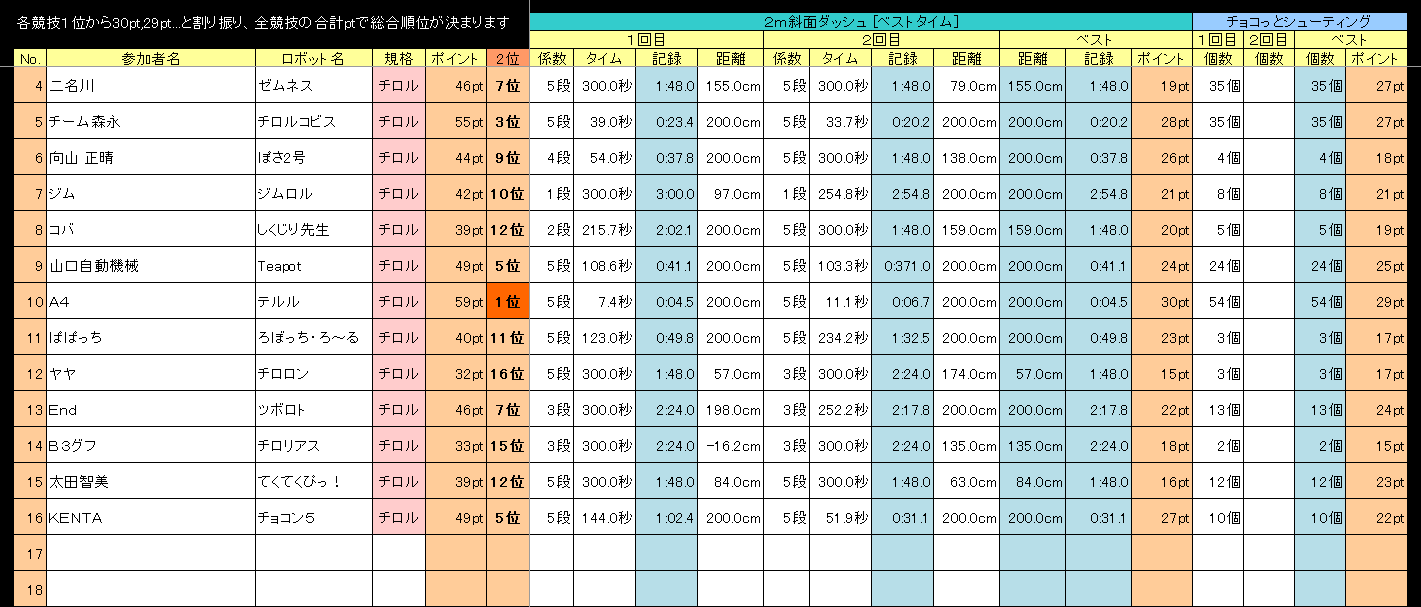
1位:テルル
2位:チロルコビス
3位:チョコン5
記録を出すコツは「安定した歩行」、「素早い旋回」、「ライン取り」になってくるかと思います。
障害は変わったりしていますが定番の競技となっており、「歩く」という基本でチャレンジする競技なので、まずここをしっかり作り込めば他への競技も挑みやすいです。
次回の競技内容はまだ決まっていませんがどの競技にもかならず歩行は必要なので、次回はもっと驚くような歩行を楽しみにしています。
次のBlogではチョコっとシューティングを解説していきます。
チロル機体製作に使いやすいサーボたち
 RS304MD-FF RS304MD-FF |
 KRS-3301 ICS KRS-3301 ICS |
 KXR-L2 ヒューマノイド型 KXR-L2 ヒューマノイド型 |