ドーモ Seijiです
前回「ROBO-ONE auto」をどう攻略しようか?という話を書いたのですが、その延長で今回はセンサーのお話を。
[距離を測る]という目的でよく使われるのがSHARP製PSD(Position Sensitive Detector)測距センサー「GP2Y0A21YK0F」です。
 入手性が良く、価格も手頃で使いやすいです。
入手性が良く、価格も手頃で使いやすいです。
スペックシートはこちら
測距レンジは10cm~80cm、アナログ出力で1.65V~2.15Vで出力(内部処理ICの仕様上、連続したアナログ値ではなく、約20mVステップの電圧出力となります)してくれるので各種コントローラのADポートに接続すれば値が取れるようになります。
気をつける点として、スペックシートの5Pのグラフを見ていただくと、近づくに連れて出力電圧が上がっていくのですが、6cmより近くなると逆に下がっていくという特性があります。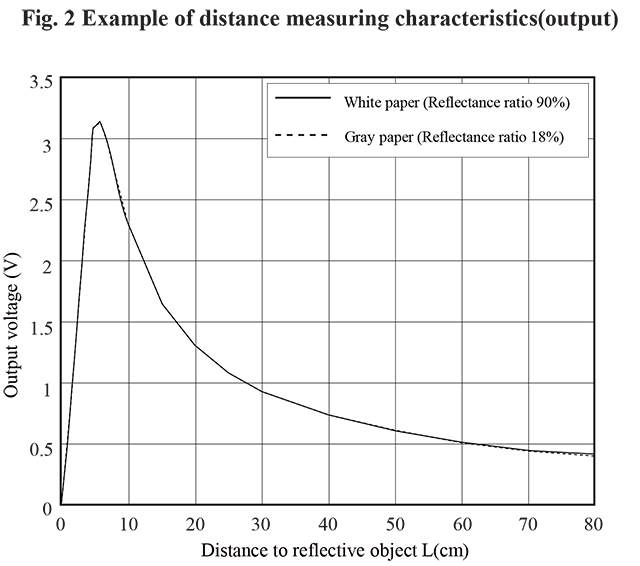 環境にもよりますが10cmより近い部分は使えないくらいの認識で使うのがいいと思います。
環境にもよりますが10cmより近い部分は使えないくらいの認識で使うのがいいと思います。
コントロールボードに複数このセンサーを繋いだ特に出力電圧が不安定になる場合があります(経験的に3個以上)。
その場合はVcc、GND間に10uF以上のバイパスコンデンサを入れてやると安定します。それでも落ち着かない場合はVo、GND間にも0.01uF程度のバイパスコンデンサを入れてあげてください。
ブレッドボードで組むと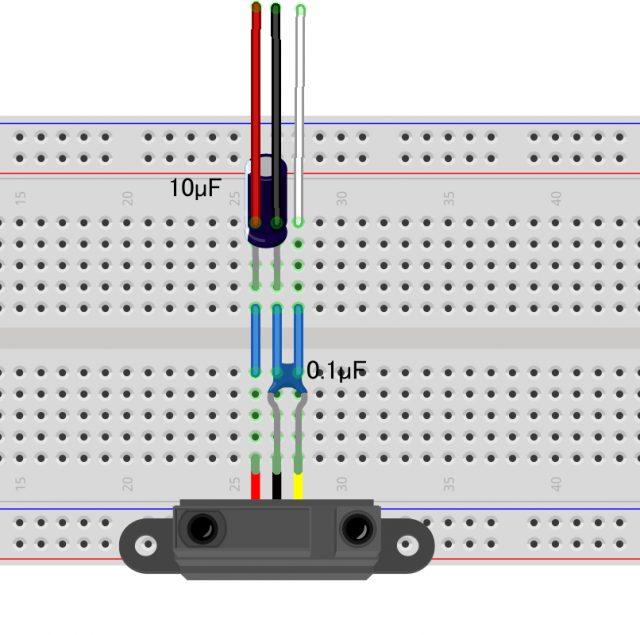 ちょっとした試験をするのにブレッドボードとジャンプワイヤは持ってると重宝します。
ちょっとした試験をするのにブレッドボードとジャンプワイヤは持ってると重宝します。
実際の接続はケーブルにコネクターを付けて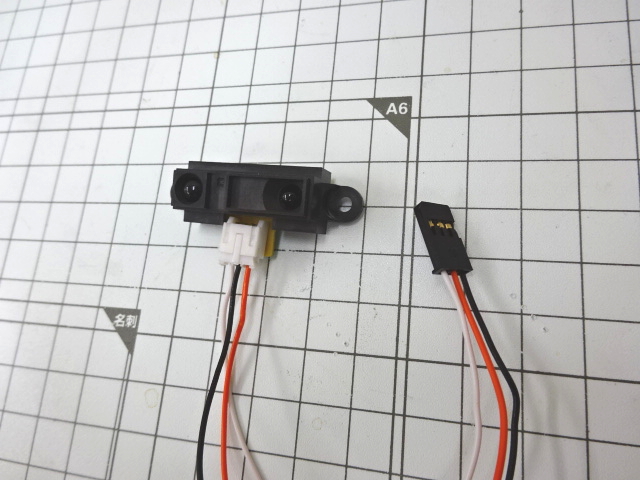
ADポートに挿します(写真はRCB-4HVのAD1に接続、黒GNDが外側です)。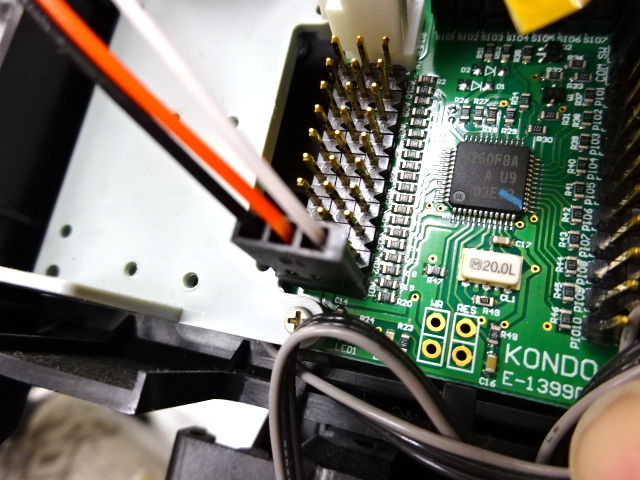
確認方法は各コントロールボード用アプリから、挿したADポート番号のAD値を確認し、センサーの距離により変動していればOKです。
相手との距離を見たり、方向を変えて複数個並べて位置の特定に使えるかと、下向きに付けてフィールドのエッジを見るのにも使えそうです。
ROBO-ONE autoに限らず、応用範囲の広いこの測距センサー。お正月に色々試すためにもまず手元に用意して気分を高めて行きましょう。
皆様のWebShopご利用お待ちしております。
 PSD素子測距センサ コネクタ付セット GP2Y0A21YK0F PSD素子測距センサ コネクタ付セット GP2Y0A21YK0F |
 超音波距離センサモジュールMaxbotix LV-EZ1 超音波距離センサモジュールMaxbotix LV-EZ1 |
 超音波センサー 超音波センサー |