できませんできません にんげんにはこんなことできません
NHKピタゴラスイッチのコーナーなんですけど最近お気に入りです。
写真を連続再生して特撮っぽく動かしてるアイデア勝負なとこがたまりません。
これから進めていくモーション作成もこんな感じで、ポーズを並べて連続で繋いでひとつのモーションに仕上げていきます。
さっそく表題にもあるように起き上がりを作っていきます。
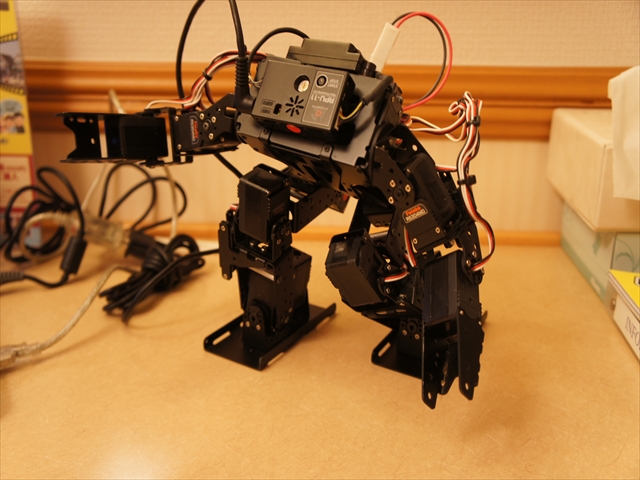
前回の続きということでPCとロボットは既に接続されており、トリムまで終わってるとこからいきます。
起き上がるってどういうことかというと「倒れている状態(今回はうつ伏せ)から立ち上がる」ことです。
なんで今さらこんなこと言ってるかというとあまりに起き上がれない機体(特に学生)が目に付くのでおぢさんつい言ってしまいます。
起き上がるのには足を使って立ち上がるのですから当然足裏に重心が来ないと、いくら足を伸ばしていってもバッタンと倒れてしまいます。
起き上がり方は人それぞれでしょうけど、私の場合はいかにスマートに足裏に重心を乗せるか? をキモに作っていってます。
あとちょっと生っぽい動作で起き上がると、なんかカッコよく見えると思い込んでるのでそのへんも意識して作っていきます。
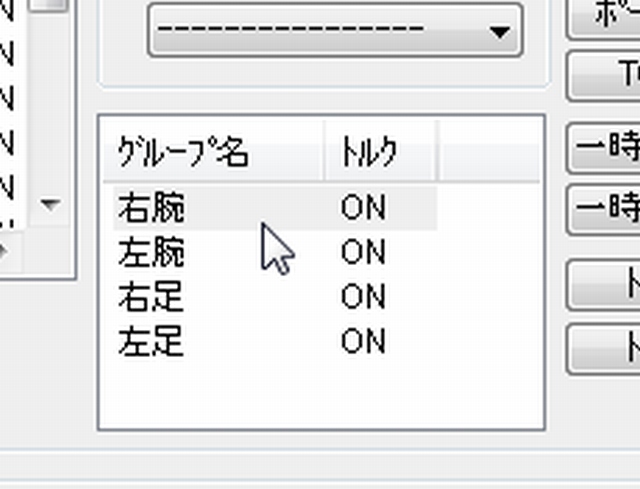
作り方ですが、教示でざっくりと作っていきます。
モーションエディターにトルクのオンオフが出来る機能があるのでここを切り替えながら各部のトルクを抜いてポーズを作り、オンにしてポーズを固めます。
ポーズを決めたらそれぞれのサーボの値を取得します。【キャプチャ】を押すとサーボの角度情報が読み出され、反映されます。
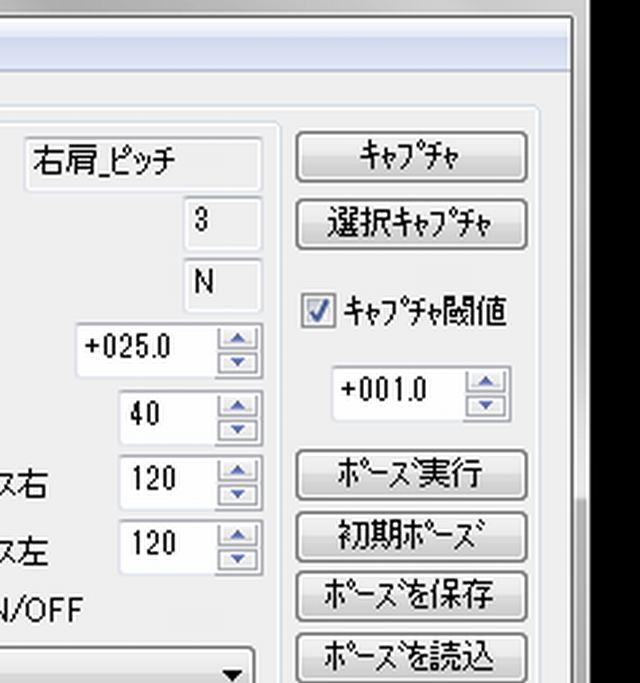
忘れずに【ポーズを保存】でセーブ。忘れると泣きます。
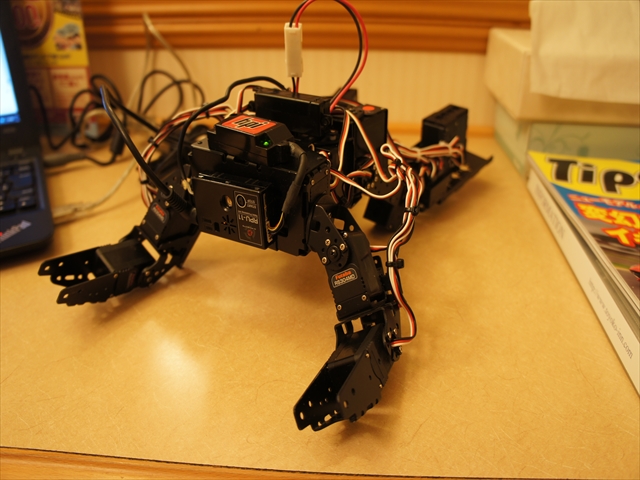
今回つくったポーズはこんな感じ
パシャッ! まず足を近づけるための予備動作
パシャッ! 腕で上半身を持ち上げつつ両足を引き込んで近づけて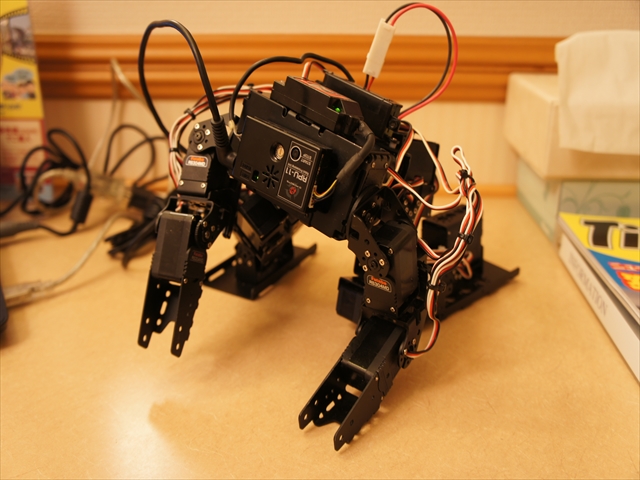
パシャッ! 右腕で前に重心を移動しつつ左手で支えながら左足にがっつり重心を乗せて
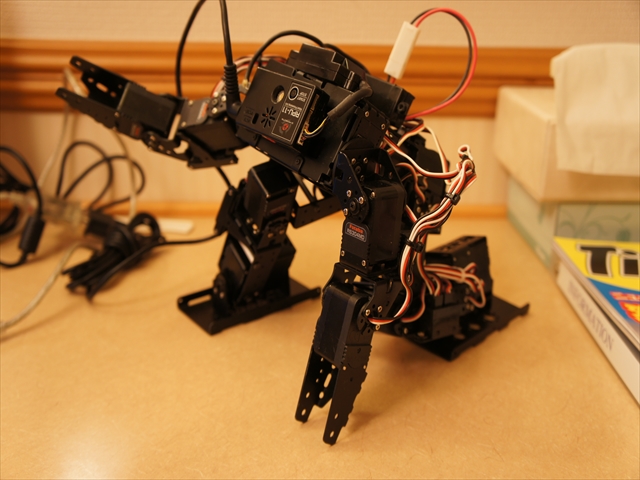
パシャッ! 腰を引きながら上半身を持ち上げて

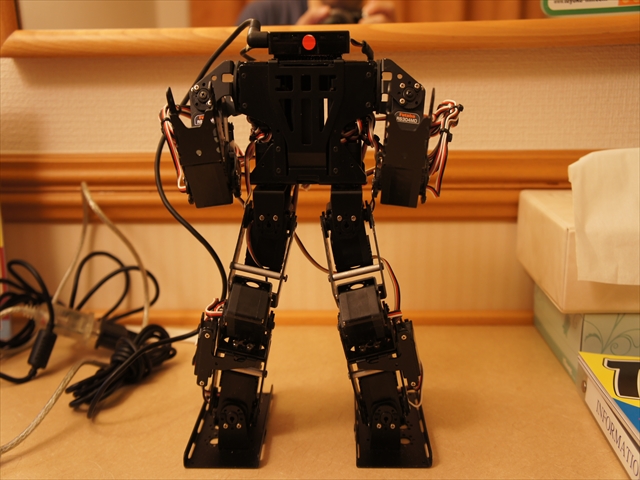
パシャッ! 立ち上がりました
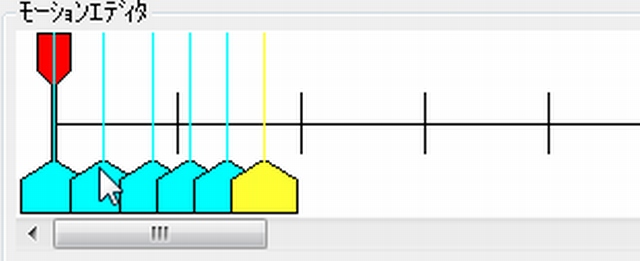
ここのポーズを今度はモーションとして再生させるために並べていきます。 こんな感じにポーズを呼び出して選択すると赤いマーカーのところにポーズが置かれるので、どんどん置いていきます。
ポーズ間の幅が時間に相当するのでポーズ間を速くしたければ狭く、ゆっくり繋ぎたい場合は広くとります。
出来たらやっぱり忘れずに保存しましょう、忘れるとまじ泣きます。
【モーション実行】でいま作ったモーションを実機で再生することが出来るので、ここで試しながらポーズ感覚を調節したりしましょう。
完成したらロボットに転送して完了です。
出来た起き上がりの動画がこちら
このくらい速く起き上がれると大会の時安心出来ます、特にアスリート系競技だと起き上がる時間すらもったいないですし(コケなきゃいいって正論はどっかに置いておく)
基本的に動作の作り方はコントローラやエディタの違いはあれど、考え方はだいたい同じかと思います。
どんなモーションにするか? どこまで追い込んで煮詰められるか? が出来を左右するのじゃないでしょうか。
ロボット作るのももちろんですが大会前にモーション作成にもっと時間を割いてあげるといい成績を出せるのでは無いでしょうか? と、自分に言い聞かせてますハイ。
あ、今回の写真 なんでオレンジがかってるのかというと………

出張中のホテルで撮影して書いてました… 大会前ってこんな感じに鳴りますよね? ね? ね?
 G-ROBOTS GR-001(RS303MR・ RS304MDサーボ仕様) |
 RIC30 |
 JO-ZERO Type2 |