ROBOMECや人工知能学会とあちこち飛び回っていろんな人にお会いして刺激されてきたyukiです。
ROBOTISサーボは、Dynamixel Proが出ると言うお知らせがきて、スペックを丹念に見ていたところです。やりたいこといっぱいで収拾つきません。w
今週から何を書こうか悩んで、個人的にはVBで同じ内容をとかもいいかなーとかおもっていました。ところが、弊社の開発途中のRS405CB用、RS485絶縁タイプ高速USB変換ボード(開発中なので仮名)と電源ボードを試して欲しいと言う要望も社内からあがりました。RS405CBを動かすことにします。
というわけで、C#講座、2ndシーズンに突入です。w
ネコ店長とRS405CB
Futaba RS405CBは、ネコ店長にも使われているアールティでは信頼性が一番高いサーボになります。
RS405CBはまだ市販される前のテスト機の2009年ごろからこれまで一度も煙を出したり、モーターが焼けたりと言うことがない実績No.1のモーターです。
ネコ店長は、着ぐるみを着ているため、「燃えない」と言うことに関して非常に気を使って設計をしています。ネコ店長の足部には弊社なりのこだわりがあって、トルクの問題もあるのですが、足の関節は2個のサーボを使うことで1個のサーボが壊れてももう一個が生きていれば支えられる構造になっています。こんな風に、いきなり倒れないよう安全にも気を使って設計しています。(まぁ、別の原因(操作ミスとか揺れが押さえ込めないとか)でこけるのですがね。w)
RS405CBは、ブラシレス仕様で消費電力の観点からも、温度センサーがばっちり機能しているので、安心の構造です。しかしながらデイジーチェインの欠点である電源の揺れはたくさんサーボをつなぐとどうしても出てしまうため、ボードのほうに絶縁対策が必要です。
世の中に市販されているRS405CB用のRS485ボードは、TTLと兼用で使えるようにするために絶縁タイプではないという事情があり、ひょんなことでデイジーチェインの電源のゆれが出るとRS405CBクラスのサーボを使うとボードが壊れることがあります。
ネコ店長やRIC Torsoの故障率を下げるために、市販品でよいのがないかずいぶん探したのですが、なかったのでアールティで欲しい性能のUSB-RS485変換ボードを開発してみました。そして、せっかく作るならと、これからの通信速度の高速化にも備えて、通信速度は~12Mbpsで、絶縁側の電源は30Vまでという高性能なものを作ってみました。FTDIのチップを使っていますので、Win、MacOSX、Linuxでいけるはずです。(写真)
それがこちらです。じゃじゃーん。
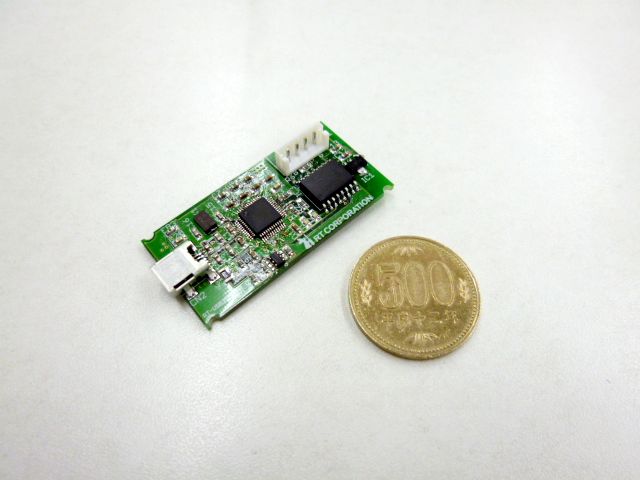
とりあえず、欲しいボードの機能は出せたということで、私の手元まで試作品が回ってきました。物理的な実験はすでにいくつかしてて、電源が揺れても壊れることはないそうです。
表側からの写真だけではわからないでしょうがまだ裏側にはジャンパーがついてる初々しいボード試作品です。www
これまたスイッチ付の電源ボードも開発してありまして、今回の実験では、それも使ってみたいとおもいます。
これらのボードの発売時期については、未定ですので、C#講座2ndシーズンで使う分には、FutabaのRSC-U485をご利用ください。
接続図については、双葉電子工業のWEBページがよくできているので、こちらの接続図をご覧ください。

実際のものはこちらです。(ただし、電源ボードとRS485ボードはアールティの試験用ボード)

来週からこれらを使って、RS405CBをC#で動かす方法を連載していきます。
【今回使う品物のリスト】
 RSC-U485 |
 RS40X用サーボアーム |
 バッテリーPR-4S780P |
 RS405CB |